Rübenroder
Ein Rübenroder ist eine landwirtschaftliche Maschine zur Ernte von Zuckerrüben. Während die ersten Maschinen von einem Traktor gezogen wurden und nur eine Reihe roden konnten, besitzen moderne selbstfahrende Rübenroder überwiegend 6-reihige Rodevorrichtungen. Die Rüben werden durch Rodeschare aus der Erde gehoben. Durch Reinigungswalzen und Siebbänder werden die Rüben von der anhaftenden Erde getrennt und in den Vorratsbunker der Maschine befördert. Die Rüben werden am Feldrand in Mieten abgelegt oder während des Rodens auf ein Transportfahrzeug überladen. Die Blätter der Rüben werden entfernt. Sie verbleiben zur Düngung auf dem Acker oder dienen als Viehfutter für Rinder und können frisch oder als Silage verfüttert werden.


Arbeitsschritte[Bearbeiten | Quelltext bearbeiten]
- Blätter der Rübe entfernen (schlegeln)
- Blattstrunken entfernen (köpfen)
- Rübe im Ganzen aus der Erde ziehen (roden)
- Rübe von anhaftender Erde reinigen
- Beförderung der Rüben bis zum Ackerrand und auf die Miete oder
- Überladen auf ein Transportmittel
Ernteverfahren[Bearbeiten | Quelltext bearbeiten]
Absetziges („2-Phasen“) Verfahren[Bearbeiten | Quelltext bearbeiten]
- 2-phasiges Verfahren
-
 1. Teil,
1. Teil,
Frontanbau: Blattschlegler
Heckanbau: Roder -
 2. Teil,
2. Teil,
selbstfahrender Rübensammelbunker
.JPG)

Bei dem absetzigen oder zweiphasigen Verfahren werden die Rüben in zwei Arbeitsgängen geerntet. Erst werden die Blätter abgeschlegelt und bei manchen Systemen auch gleichzeitig die Rüben aus dem Boden gezogen und abgelegt. Vorrangig wird dieser Arbeitsgang durch an Traktoren angebaute Geräte erledigt. Der Antrieb erfolgt über die vordere oder hintere Zapfwelle des Schleppers. Bei geschobenen Systemen fährt der rückwärts fahrende, mit einer Rückfahreinrichtung ausgestattete Traktor über bereits vollständig abgeernteten Boden. Häufiger sind Systeme, bei denen vorne am Traktor ein so genannter Krautschläger mit Köpfer und hinten ein Rodeaggregat angebaut wird. Da der Traktor dabei durch die noch ungerodeten Rübenreihen fährt, ist er in diesem Fall mit dünnerer, sogenannter Pflegebereifung ausgestattet. Diese Reifen sind so schmal, dass sie ohne Beschädigung der Rüben durch die Reihen fahren können. Dann sammelt ein so genannter Ladebunker die abgelegten Rüben auf, dadurch werden grobe Schmutzanhaftungen beseitigt. Nach der Reinigung verbleiben die Rüben im Bunker, bis dieser voll ist. Über ein Förderband wird das Erntegut entweder auf eine Miete oder einen Hängerzug entleert. Neben gezogenen Systemen gibt es Ladebunker auch als Selbstfahrer (eine eigenständige Maschine, also ohne Fremdantrieb). Absetzige Systeme wurden in Deutschland weitgehend von selbstfahrenden Vollerntern ersetzt. In anderen Zuckerrübenanbauländern, insbesondere in Belgien, ist das „2-Phasen“-System das häufigste Ernteverfahren für Zuckerrüben.
Vollernter[Bearbeiten | Quelltext bearbeiten]
Mit dem Vollernter werden alle zur Ernte notwendigen Arbeitsgänge erledigt. Das heißt, das Köpfen, Roden und Reinigen der Rüben sowie das Entleeren des Bunkers erledigt eine Maschine. Auch bei diesem Ernteverfahren gibt es gezogene und selbstfahrende Maschinen. Die von einem Traktor gezogenen Maschinen sind noch öfter anzutreffen, werden aber zunehmend von Selbstfahrern verdrängt. Systeme, die bis zu 3 Reihen gleichzeitig ernten, sind in Deutschland üblich, allerdings gibt es z. B. in den USA auch gezogene 12-Reiher.

Bei modernen selbstfahrenden Vollerntern werden meistens 6 Reihen gleichzeitig geerntet. Neuerdings gibt es auch 9- oder 12-reihige Roder, die aber eher für Standorte mit großen Schlaglängen oder -größen gedacht sind. Diese Maschinen haben, wie aktuelle Mähdrescher, eine abnehmbare Rodevorrichtung. In Deutschland kommen diese Systeme wegen ihrer Überbreite und Überlänge, bei hinten angehängtem Rodeaggregat, eher selten zum Einsatz.
Selbstfahrende 6-reihige Rübenvollernter bearbeiten circa 74 % der Anbaufläche in Deutschland. 1-reihige Roder ernten nur noch weniger als 4 %, und von 2-reihigen Rodern werden etwa 9 % der Zuckerrübenbestände eingefahren.[1] Der Rest verteilt sich auf andere Systeme.
Baugruppen[Bearbeiten | Quelltext bearbeiten]
Schlegler[Bearbeiten | Quelltext bearbeiten]
-
 Beispiel einer drehenden Schleglerwelle
Beispiel einer drehenden Schleglerwelle -
 … und bei Stillstand
… und bei Stillstand


Mit dem Schlegler (auch Häcksler genannt) wird das Rübenblatt entfernt. Er besteht aus einer quer zur Fahrtrichtung drehenden Schleglerwelle und dem dazugehörigen Schleglergehäuse. Die Schleglermesser, meist aus gebogenen Flacheisen gefertigt, sind auf der Schleglerwelle in Laufrichtung pendelnd gelagert.
Das abgeschlagene Blatt wird im Schleglergehäuse nach oben geworfen, dort in einem Trog aufgefangen, zur Seite gefördert (z. B. durch eine Blattschnecke) und dort durch eine Blattschleuder vom Rübenbestand weg auf dem Acker verteilt. Diese Bauart wird Blattschlegler genannt.
Bei einer anderen Ausführung wird das Blatt beim Schlegeln durch besondere Messer ganz fein geschnitten und mittels Leit- und Prallblechen zwischen den Rübenreihen abgelegt. Dort soll es liegen bleiben und den weiteren Rodevorgang nicht beeinflussen. Der Fachbegriff hierfür lautet: Integralschlegler.
Auch die Verkoppelung beider Bauarten findet Anwendung. Dabei ist der Aufbau wie ein normaler Blattschlegler, nur sind zusätzlich Leitbleche, wie beim Integralschlegler, und eine Klappe zum Verschließen des Blattschneckentroges vorhanden. Bei offener Klappe ist es ein Blattschlegler mit Seitenauswurf, bei geschlossener Klappe wird das Blatt zwischen die Reihen geworfen.
Nachköpfer[Bearbeiten | Quelltext bearbeiten]
Die Rübenköpfe zu entfernen ist Aufgabe des Nachköpfers. Den Nachköpfer, gelegentlich nur „Köpfer“ genannt, gibt es wieder in mehreren Bauarten. Allen gemeinsam sind die höhenverstellbaren Nachköpfmesser, die schräg zur Fahrtrichtung und federnd angebracht sind. Unterschiedlich sind die Messerformen (z. B. Sichelmesser) sowie die Anstellwinkel. Hinter den Messern sind Leitfedern angeordnet. Sie sorgen dafür, dass die abgeschnittenen Rübenköpfe zwischen die Reihen geleitet werden. Für die Höhenführung sind mal schleifende Kämme, mal Räder im Einsatz. Zusätzlich zur Höhenverstellung gibt es meist eine Vorrichtung zum Einstellen der Schnittstärke. Eine Sonderausführung stellt der Exaktköpfer dar. Seine gezackten, angetriebenen Tasträder sorgen für eine besonders genaue Köpfung.
Entblätterer[Bearbeiten | Quelltext bearbeiten]

Um noch mehr Ertrag aus der Zuckerrübe zu holen, werden Entblätterer verwendet. Diese können die Nachköpfer ergänzen oder komplett ersetzen. Mit dieser Technik wird versucht, die Rübe rückstandslos von Blättern und Strunken zu befreien. Hinter der Schleglerwelle ist eine zweite Welle mit Gummi- oder Kunststoffschlegeln angeordnet. Mit der ersten Welle werden die Blätter der Rüben höher abgeschnitten als bei der Verwendung eines Köpfers. Die Gummis der zweiten Welle „radieren“ auf dem Rübenkopf, ohne diesen wesentlich zu beschädigen. Die erreichbare Rüben-Qualität hängt dabei maßgeblich von der Beschaffenheit des Materials und dem Verschleiß der Gummischlegel ab. Ebenso wichtig ist ein gleichmäßiger Bestand der Rüben. Stehen die Rüben unterschiedlich hoch aus dem Boden oder gibt es im Bestand einen großen Größenunterschied, können auf den kleineren Zuckerrüben Blattreste stehen bleiben.
Der Betrieb einer zusätzlichen Entblätterer-Welle erfordert eine höhere Antriebsleistung. Das ist bedingt durch mehr Reibungsverluste in Lagerung und Antrieb der Entblätterer-Welle, der Gleitreibung der Gummischlegel auf den Rüben sowie dem zusätzlichen Luftwiderstand der Gummischlegel.
Rodeschare[Bearbeiten | Quelltext bearbeiten]
-
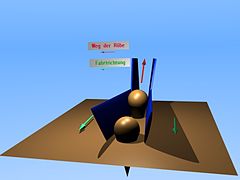 Rodeschare 3D
Rodeschare 3D -
 Radrodeschare 3D
Radrodeschare 3D


Früher waren die Zinkenschar und die Plattenschar gebräuchliche Bauarten von Rodescharen.[2] Heute werden die Zuckerrüben wahlweise durch Polderschare oder Radrodeschare aus dem Boden gehoben.
Polderschare, auch Rüttel- oder Flügelschare genannt, sind paarweise angeordnete flügelförmige Platten. Diese werden gleichzeitig oder phasenversetzt auf und ab bewegt. Das Scharpaar ist gewissermaßen in einer schrägen V-Form angeordnet, wobei die Spitze nach hinten-unten zeigt. Die Rübe wird durch die Vorwärtsbewegung nach oben gedrückt. Das Rütteln soll ein schonendes Roden ermöglichen, gleichzeitig wird ein Anhaften von Erde und Blatt verhindert. Angetrieben werden die Rüttelschare über Schubstangen einer Exzenterwelle. Eine Linearführung sorgt dafür, dass die Rüttelschare in einem begrenzten Bereich der Rübenreihe seitlich folgen können.
Radrodeschare, manchmal Oppelräder genannt, sind V-förmig paarig angeordnete Räder. Mindestens eins davon ist angetrieben. Bei der Drehbewegung wird die Zuckerrübe eingeklemmt und herausgezogen. Auch hier wird durch eine geeignete Lagerung dafür gesorgt, dass die Räder seitlich ausweichen können. Anstelle des zweiten Rades wird manchmal ein starres Schar verwendet.
Die Schare können über eine Höhenverstellung unterschiedlich tief in die Erde eingreifen und werden mit einer Tiefenführung parallel zum Boden geführt. (siehe Abschn. 3.9.2 und 4.) Seit 2009 gibt es erstmals Rodeaggregate mit einzeln höhenverstellbaren Rüttelscharen. Damit kann sogar der Höhenunterschied zwischen einzelnen Reihen (Fahrspuren oder Furchen) ausgeglichen werden.
Reinigung[Bearbeiten | Quelltext bearbeiten]

Durch die Reinigung wird die Zuckerrübe schonend von Erdresten befreit. Die Rüben durchlaufen oft mehrere Etappen der Reinigung. Die Rodeschare übergeben an die erste Etappe. Diese besteht häufig aus in Fahrtrichtung rotierende Aufnahmewalzen oder sogenannten Rodewalzen. Bei den populärsten Konstruktionen werden mehrere dieser Walzen hintereinander betrieben. Bis auf die erste sind meist alle Rodewalzen mit spiralförmigen Rundstahl-Wendeln bestückt. Nach Art einer Archimedischen Schraube werden die Rüben dadurch zur Mitte des Rodeaggregates und durch die Drehrichtung nach hinten zur zweiten Etappe gefördert. Einige Hersteller setzten bei der ersten Etappe statt Rodewalzen Siebsterne oder so genannte Aufnahmesterne ein. Die wichtigsten Aufgaben der ersten Etappe sind das Aussieben von groben Schmutz und das Zusammenführen der Rüben zu einem Strom. Bei den meisten Systemen wird dieser Rübenstrom zwischen den Vorderrädern hindurch geleitet. Beim 9 oder 12-reihigen Vollernter wird das zum limitierenden Faktor, weil der Durchlass und damit die Schlagkraft begrenzt ist. Die nun folgende Etappe der Hauptreinigung ist in ihrer Ausführung abhängig von der Größe des Rübenroders. Folgende Systeme werden einzeln oder kombiniert verwendet:
- Siebsterne
- Noppenwalzen
- Zwickwalzen
- Siebbandgurte (auch Siebkette genannt)
Mit einem Elevatorgurt, der letzten Etappe, werden die Zuckerrüben kontinuierlich nach oben gefördert und in den Bunker geworfen.
Bunker[Bearbeiten | Quelltext bearbeiten]
Der Vorratsbunker nimmt die geernteten Zuckerrüben auf. Eine große Schneckenwelle sorgt dabei für eine gleichmäßige Verteilung im Bunker. Waagrechte Fördereinrichtungen am Boden des Bunkers sind Kratzböden. Dabei handelt es sich um paarige Kettenstränge, die mehrfach durch Stahlprofile verbunden sind. Werden die Ketten über den Boden gezogen, setzen sich die Rüben in Bewegung.
Das Abladen der Rüben erfolgt bei älteren Systemen einfach durch Abkippen. Um ein Überladen auf Anhänger zu ermöglichen, werden bevorzugt Siebbandgurte an einem ausklappenden Rahmen verwendet. Durch die Kratzböden im Bunker wird dieses Entladeband mit Rüben beliefert. Das Entladeband kann in der Höhe variiert werden, um die Zuckerrüben entweder auf eine Miete abzulegen oder auf ein Transportfahrzeug zu laden.
-
 Rübenvollernter beim Abbunkern
Rübenvollernter beim Abbunkern -
 Gezogener Vollernter beim Abladen
Gezogener Vollernter beim Abladen -
 Roder im Hundegang beim Überladen auf ein Holmer Systemfahrzeug mit Rübenbunker
Roder im Hundegang beim Überladen auf ein Holmer Systemfahrzeug mit Rübenbunker -
 Zuckerrübenmiete
Zuckerrübenmiete




Fahrwerk[Bearbeiten | Quelltext bearbeiten]

Die absetzigen Roder und die gezogenen Vollernter sind einfache einachsige Maschinen. Alle Baugruppen werden vom ziehenden Traktor über Zapfwelle oder Hydraulik angetrieben. Selbstfahrende Rübenroder sind immer mit mehr als einer Achse ausgeführt. Es werden große, breite Räder, oft in ungerader Zahl verwendet. Das unpaarige Rad läuft zwischen den Spuren der übrigen Räder. Zweck dieser Konstruktion ist die Verringerung des Bodendrucks und das Überrollen des – von den Rüben entfernten – losen Schmutzes. Für die größeren Arbeitsbreiten der 9- und 12-reihigen Maschinen werden teleskopierbare Achsen zum Vergrößern der überrollten Fläche verwendet.[1] Statt eines unpaarigen Rades haben andere Fabrikate die Möglichkeit, den Rahmen zu knicken. Mit dem Knick-Rahmen und Allradlenkung kann der Rübenroder schräg im so genannten Hundegang oder Schongang über den Acker rollen.
Die Achsen sind ohne Federung mit dem Rahmen verbunden. Mindestens eine Achse ist dabei um die Fahrzeuglängsachse pendelnd gelagert, um ein verschränken der Achsen zu ermöglichen. Bei mehr als zwei Achsen müssen diese zusätzlich einen Höhenausgleich zulassen. Angetrieben werden die Roder dieselhydraulisch. Dabei treibt ein Dieselmotor mehrere Hydraulikpumpen an. Hydraulikmotoren übertragen die Kraft manchmal direkt, aber vorrangig über Getriebe an die Antriebsräder. Die Lenkung wird ebenfalls hydraulisch betätigt.
Motor[Bearbeiten | Quelltext bearbeiten]
In Rübenrodern kommen vorwiegend Dieselmotoren zum Einsatz. Dabei werden Aggregate unverändert oder leicht modifiziert aus dem Regal von Nutzfahrzeugherstellern übernommen. Die Motoren sind dem Leistungsbedarf der unterschiedlichen Maschinen angepasst. So haben sechsreihige Selbstfahrer Motoren mit Leistungen zwischen circa 380 bis 600 PS. Der Druck der Politik nach sparsamen und sauberen Antrieben veranlasst immer mehr Hersteller elektronisch geregelte Motoren einzusetzen. Durch diese CAN-Bus-Steuerung kann die Motordrehzahl und die bereitgestellte Leistung der tatsächlichen Antriebsleistung angepasst werden. So wird kostensparend immer mit der niedrigsten möglichen Drehzahl gerodet. Diese Art der Motorregelung wird als Automotive-Steuerung bezeichnet. Ein weiterer Vorteil des elektronischen Motormanagements ist die Möglichkeit Fehlerdiagnosen „on Board“ durchführen zu können.
Ein Trend der sich immer deutlicher abzeichnet, ist die Verwendung von Bio-Kraftstoffen wie Biodiesel oder Rapsöl. Während der Betrieb mit Bio-Diesel von den meisten Herstellern freigegeben und unproblematisch ist, gibt es bei der Verwendung von reinem Rapsöl einige Schwierigkeiten. So muss der Motor für den Betrieb mit Rapsöl mit einer Kraftstoffheizung, anderen Filtern und eventuell mit einem Zusatztank ausgerüstet werden. Zusätzlich verkürzen sich die Ölwechselinterwalle, um einen zu großen Eintrag des Rapsöls in das Motoröl zu verhindern. Bei Nichteinhaltung drohen Motorschäden.
Hilfs- und Unterstützungssysteme[Bearbeiten | Quelltext bearbeiten]
Überwachung und Regelung[Bearbeiten | Quelltext bearbeiten]

Zur Überwachung der Rodevorgänge werden beim modernen Rübenvollernter elektronische und optische Systeme eingesetzt. Elektronisch werden die Maschinen mit einer Vielzahl von Sensoren und Potentiometern überwacht. z. B. Hallgebern, Druck-, Drehzahl- und Temperatursensoren. Die so aufgezeichneten Daten werden von den Steuergeräten der Maschine verarbeitet und gleichzeitig über ein Datenterminal dem Fahrer angezeigt. Mit dem Terminal wird nicht nur die Stellung relevanter Baugruppen (z. B. Rodescharhöhe) und des Fahrwerks (z. B. bei Allradlenkung) angezeigt, sondern es können auch Einstellungen vorgenommen werden. Der Einsatz von immer mehr Sensoren und Steuergeräten versetzt die Hersteller in die Lage, automatische Regelungen wie die Tiefenführung des Rodeaggregates oder eine Drehzahlanpassung der Siebsterne umzusetzen. Folgende Steuergeräte werden zum Beispiel in einem HOLMER Terra Dos T4 verbaut:
- 5 Rechner für Maschinensteuerung
- 1 Fahrantriebssteuergerät
- 1 Steuergerät Niveauausgleich 2. Hinterachse
- 2 Rechner für Roder und Schlegler
- 1 Fahrzeugführungsrechner
- 1 Motorsteuergerät (Dieselmotor)
Bestimmte Bereiche der Maschine müssen optisch, mit Kameras, überwacht werden. Dazu zählt die rückwärtige Ansicht beim Rückwärtsfahren und Verlauf der Reinigung während des Rodebetriebes. Mit einem oder mehreren Videomonitoren in der Kabine hat der Fahrer so immer alles im Blick. Gefahren und Probleme können rechtzeitig erkannt und die Maschine korrekt eingestellt werden.
Automatische Reihenführung[Bearbeiten | Quelltext bearbeiten]
Während bei älteren Systemen noch von Hand den Rübenreihen gefolgt wurde, übernimmt das bei modernen Rübenrodern eine Parallelfahreinrichtung. Es werden die Rüben (über Rodeschare) sowie die Blätter (über Blatttaster) abgetastet. Die Bewegungen werden durch Potentiometer in elektrische Signale umgewandelt. Die Elektronik steuert damit die hydraulische Lenkung.
Tiefenführung[Bearbeiten | Quelltext bearbeiten]
Um sauber roden zu können, müssen die Schare immer eine bestimmte Höhe zum Boden haben. Dafür sorgt die Tiefenführung. Über Schleifkufen oder Tasträder wird das Profil des Bodens abgetastet. Heben und Senken des Rodeaggregates wird hydraulisch oder elektronisch gesteuert. Die beiden Seiten sind unabhängig voneinander geregelt. Bei besonders breiten Rodeaggregaten (z. B. bei 9-reihigen) wird es schwieriger, den durchgehenden Kontakt zum Boden zu behalten (Fahrspuren, Bodenwellen in Fahrtrichtung). Um das zu verhindern, werden die Aggregate bei einigen Herstellern geteilt.
Hangausgleich[Bearbeiten | Quelltext bearbeiten]
Um bei Querneigung die Spur zu halten, werden an gezogenen Rübenrodern sogenannte Hangscheiben verwendet. Dabei handelt es sich um eine drehbare Stahlscheibe, die hinter dem Roder hydraulisch in den Boden gedrückt wird. So wird, wie bei einem Boot mit Kielschwert, ein Abtreiben verhindert. Auch das Gegensteuern mit der Lenkung ist eine Methode, um ein Abdriften am Hang zu vermeiden. Letztere Methode wird bei Selbstfahrern durch das Lenken der Hinterachse(n) und bei gezogenen Rodern durch das Schwenken eines Rades erreicht. Dem Fahrer obliegt es, je nach Bodenverhältnissen und Hangneigung gegen den Hang zu steuern.
Hangstütze[Bearbeiten | Quelltext bearbeiten]
Durch ihren hohen Aufbau bedingt, ist der Schwerpunkt von Vollrübenrodern (besonders vollbeladene Selbstfahrer) ungünstig hoch. Um dennoch ein Roden am Hang zu ermöglichen, werden die pendelnd gelagerten Achsen mit Hydraulikzylindern abgestützt.
Einstellung der Rübenroder[Bearbeiten | Quelltext bearbeiten]
Ernteverluste entstehen durch falsches Köpfen, Abbrechen von Rübenteilen oder durch die von dem Rodeaggregat nicht erfassten Rüben. Daher ist ein Rübenroder je nach Rübenbestand und entsprechend der Bodenverhältnisse einzustellen.
- Der Schlegler sollte die Rübenblätter 1–3 cm über dem Rübenkörper abtrennen. Idealerweise wird die Zuckerrübe dazu direkt unter dem Blattansatz geköpft. Schon 1 cm mehr bedeutet einen Erntemassenverlust von 7 bis 9 %.[2]
- Die Rodeschare dürfen nur so tief wie nötig geführt werden. Ein tiefes Roden fördert unnötig viel Erde in den Roder und muss wieder abgereinigt werden. Wird dagegen zu flach gerodet, verbleiben die Rübenspitzen im Boden oder die Rodeschare schneiden die Rüben. Bei losem Boden können die Rüben umkippen und werden nicht mehr erfasst.
- Die Rodegeschwindigkeit ist je nach Durchsatz und Reinigungsfähigkeit des Roders sowie der Qualität der gerodeten Rüben anzupassen.
- In der Reinigung werden Rübenbeschädigungen und Wurzelbrüche durch geringe Drehzahlen der Siebaggregate vermieden. Die Drehzahlen sind so gering zu wählen, dass ein einwandfreier Weitertransport gerade noch möglich ist. Um mehr anhaftende Erde zu beseitigen, sind jedoch höhere Drehzahlen anzustreben. So ist auch diese Einstellung abhängig von den Rüben sowie der Bodenbeschaffenheit. Der beste Kompromiss wird durch ausprobieren erreicht.
Vorgehensweise beim Roden[Bearbeiten | Quelltext bearbeiten]
Nachstehend wird die Vorgehensweise beim Roden eines Rübenfeldes dargelegt. Dabei ist es wichtig, ob es sich um einen gezogenen Roder oder einen geschobenen Roder (Rodeaggregat vor der ersten Achse) handelt, beziehungsweise ob das verwendete System beidseitig oder nur einseitig die Rüben aufnimmt. Das Rübenfeld wird vom Vorgewende umschlossen. Dieses ist schon beim Drillen auf den verwendeten Roder abgemessen worden und umfasst im Normalfall zwischen 24 und 48 Rübenreihen.
Beim Anroden wird nicht die am Ackerrand liegende Bahn zuerst gerodet, sondern die zweite oder dritte Fahrgasse zuerst, um auch am Rand alle Rüben mit einseitig rodenden Systemen aufsammeln zu können. Bei beidseitig rodenden oder geschobenen Systemen ist dieses Vorgehen teilweise unnötig. Beim Anroden sind geschobene und beidseitige Systeme klar im Vorteil, da nicht über den Rübenbestand gefahren werden muss und daher keine diesbezüglichen Verluste entstehen. Im Vorgewende wird anfangs eine Fläche freigerodet, um dort die geernteten Rüben abzuladen. Notfalls werden, bei Platzmangel oder zu kleinem Bunkervolumen, die ersten Rüben gleich auf einen Anhänger geladen.
Einseitig erntende Roder roden nun einmal oder mehrmals mittig durch das Feld und außen am Feldrand zurück, um dort ebenfalls das Vorgewende freizulegen. Nun wird abwechselnd um die so entstandenen Beete herumgefahren. So wird ein weiteres Überfahren von Rüben vermieden. Je nach Größe und Form des Feldes werden mehrere Beete herausgearbeitet. Beidseitig arbeitende Rübenroder können dagegen nach dem Freimachen des Vorgewendes beliebig die Reihen auf und ab roden. Bei langen Feldern ist ebenfalls das Teilen in Beete üblich. So vermeidet der Landwirt, durch das separate Anlegen von Mieten, lange Leerfahrten zwischen Rübenbestand und Ackerrand. In diesem Zusammenhang werden auch Rüben auf Abfuhrfahrzeuge (z. B. Traktoren mit Anhänger) überladen. Sie ersparen den Rübenrodern den Weg zur Miete. Die Miete selbst wird je nach späteren Ladeverfahren (z. B. Rübenreinigungslader) beim Abbunkern geformt.
Geschichte[Bearbeiten | Quelltext bearbeiten]
In den Anfängen des Zuckerrübenanbaus wurde noch viel mit Hand gearbeitet. So wurden die Rüben mit verschiedenen Rübengabeln aus dem Boden gehoben, danach per Hand geköpft und auf Haufen geworfen, von wo aus sie mit Pferdekarren abtransportiert wurden.
Im Zuge der voranschreitenden Industrialisierung im letzten Jahrhundert wurde es möglich, auch landwirtschaftliche Arbeiten durch den Einsatz von Technik zu erleichtern. Bis in die 1920er Jahre wurden so mehrere Maschinen gebaut, die entweder das Köpfen übernahmen oder dem Roden dienten. Diese wurden zunächst von Pferden oder Ochsen gezogen.
Otto Wilke, ein Landwirt aus Harber in Niedersachsen, hatte die Idee, eine Maschine zum Ernten der Zuckerrüben zu bauen. Dabei sollten die Rübenblätter exakt abgetrennt, die Zuckerrüben gerodet und beides getrennt auf dem Acker abgelegt werden. In Zusammenarbeit mit Elektromeister Heinrich Meisoll und Schlossermeister Friedrich Bote baute Otto Wilke 1927 die ersten Prototypen eines Vollrübenroders. Ein mit Zinken bestücktes Rad (Igeltaster) sorgte bei diesen Konstruktionen für das Ertasten der Rübenkopfhöhe und für ein exaktes Abtrennen des Blattes. Eine, 1928 patentierte, Rübenhebevorrichtung zog die Rüben aus dem Boden, um sie anschließend in einer Reihe auf Schwad zu legen. Für den Antrieb der Siebketten und Fördereinrichtungen wurde die Drehbewegung der gezackten Räder verwendet.
Die Serienfertigung übernahm die Firma Krupp und stellte 1936 die erste weiterentwickelte Maschine zum Verkauf. Ende 1936 übernahm Lanz in Mannheim die Fortsetzung der Produktion. Mit der Erfindung der Zapfwelle konnte durch den Wegfall des störanfälligen Antriebs über das Rad die Arbeit des Vollrübenroders entscheidend verbessert werden.
Nach dem Zweiten Weltkrieg übernahmen die Alliierten das Patent und verkauften es an die Firma Wilhelm Stoll in Broistedt. Diese entwickelte den Rübenroder ständig weiter. So wurde der Bunker für die Rüben größer und ein Schlegler übernahm das Abtrennen des Blattes, während der Nachköpfer nur noch für die Köpfe der Rüben zuständig war. Die Reinigung der Rüben wurde verfeinert und die Reihenzahl auf drei erhöht.
Die Firma TIM stellte 1961 ihren ersten „lift-up sugar beet harvester“ zum Verkauf und konnte sich mit ihren zweireihigen und dreireihigen Rodeaggregaten einige Zeit am Markt behaupten. Aber sie wurde durch die wachsende Konkurrenz der Sechsreiher Rodeaggregate in eine Außenseiterrolle gedrängt.
Ende der 60er Jahre baute der Landmaschinenmechaniker Duquenne aus Belgien auf Initiative der Zuckerfabrik Tirlemontoise einen sechsreihigen selbstfahrenden Einmann-Köpfrodebunker. Die Zuckerfabriken warteten schon auf solche Innovationen um eine weitere Rationalisierung beim Zuckerrübenanbau voranzutreiben. So kamen die Duquenne-Maschinen 1971 auch für die Südzucker AG in Deutschland zum Einsatz. Die Konstruktion mit dem Rodeaggregat zwischen den Achsen hatte aber bei nasser Witterung arge Probleme. Die Vorderräder verdichteten den Boden um die Rüben so stark, dass diese nur schlecht und mit hohem Erdanteil gerodet werden konnten. Südzucker entschloss sich deshalb ein Projektteam zu gründen, um selbst einen 6-reihigen Selbstfahrer zu bauen. Das Team, unter Leitung von Dr. Hans Irion, setzte sich aus Landwirten und Maschinenbauern zusammen und wurde wissenschaftlich unterstützt.[3]
Vorreiter bei der Entwicklung von 6-reihigen Rodern waren die Firmen Holmer und Ropa. Hermann Paintner, ein junger Landwirt aus Bayern, hatte bereits 1972 einen selbstfahrende Zuckerrübenvollernter aus alten vorhandenen Komponenten und Teilen gebaut. Den Auftrag für eine Kleinserie bekam, 1973, die Firma von Alfons Holmer aus Eggmühl. Die Roder wurden unter dem Namen Holmer, System Paintner bekannt.

Die Südzucker AG stellt 1974 den Köpfrodebunker betaking 3000 der Öffentlichkeit vor. 1976 beginnt die Serienproduktion und endet 1977 mit dem Verkauf der Produktionslizenz an die Firma Stoll. Stoll, lange Zeit Marktführer in Deutschland, vertraute jedoch weiterhin auf seine gezogenen Produkte.[3] Ein Fehler, wie sich später herausstellen sollte. Bei der Entwicklung der 6-reihigen Rübenvollernter hat Stoll die Entwicklung verschlafen und ist vom Markt verdrängt worden.
Im Jahr 1986 gründete H. Paintner seine eigene Firma in Sittelsdorf mit dem Namen Ropa.[4] Ab 1988 nahmen die Roder langsam den heutigen Grundzüge an. Rahmen mit großen Rädern für geringen Bodendruck, ein voluminöser Bunker, Allradlenkung und die effektive Reinigung der Rüben sorgten für den Durchbruch am Markt. Heute sind diese gelegentlich Köpfrodebunker genannten Maschinen Standard und aus der Zuckerrübenindustrie nicht mehr wegzudenken.

Zeittafel[Bearbeiten | Quelltext bearbeiten]
- 1927: baut Otto Wilke den ersten Vollrübenroder
- 1936: erst Firma Krupp, später dann Lanz in Mannheim erste Serienfertigung eines Vollrübenroders
- ab 1945: übernimmt Stoll die Rübenroderproduktion nach dem Kauf der Patentrechte
- 1961: Tim Thyregod A/S aus Dänemark erweitern ihr Angebot um einen Rübenvollernter
- 1971: Einsatz des Duquenne-Roders in Deutschland
- 1972: Paintner baut einen 6-reihigen selbstfahrenden Vollernter
- ab 1974: erste Serienfertigung eines selbstfahrenden 6-reihigen Köpfrodebunkers. Typ: Holmer, System Paintner
- 1974: Die Südzucker AG baut den betaking 3000
- 1974: Frans und Richard Vervaet bauen in Biervliet (Niederlande) einen Vollernter mit Bunker
- 1986: H. Paintner gründet die Ropa Fahrzeug und Maschinenbau GmbH
- 1992: dreiachsiger Roder von Ropa
- 1995: dreiachsiger Roder von Ropa mit Knickrahmen
- 1996: Holmer Terra Dos mit Knickrahmen
- 1996: Elektronik hält Einzug in die Rübenrodertechnik
- 1998: Euro Tiger von Ropa
- 2004: Firma Grimme baut einen Vollernter mit Raupenketten
- 2006: Firma Gilles (Belgien) baut ein achtreihiges 2-phasiges Erntesystem
- 2006: Ropa baut 9-reihiges Rodeaggregat mit Schnell-Kupplung
- 2007: Firma Agrifac baut einen 12-reihigen selbstfahrenden Zuckerrübenvollernter
- 2007: Der Terra Dos T3plus von Holmer wird mit einer teleskopierbaren, lenkbaren Hinterachse ausgestattet
- 2008: Firma Grimme baut in Anlehnung an US-amerikanische Maschinen einen so genannten „Entblätterer“ und einen gezogenen Überladeroder mit Zwischenbunker (2-phasigen Erntetechnik)
- 2009: Firma Holmer Maschinenbau präsentiert den HR-Roder mit einzeln höhenverstellbaren Rüttelscharen und hydraulischer Steinsicherung
- 2012: Im Juli 2012 liefert Holmer den 3.000 Zuckerrübenvollernter aus. Im Dezember wird der Prototyp des Terra Dos T4-40, ein dreiachsiger Vollernter, im Feldeinsatz getestet
Hersteller[Bearbeiten | Quelltext bearbeiten]
Hier werden aktuelle und ehemalige Hersteller alphabetisch aufgelistet.
- Agrifac Machinery B.V. (Niederlande) – Marken: Agrifac, früher auch Riecam und WKM – seit 2012 im Portfolio von Exel Industries[5]
- DeWulf (Belgien)
- Ets Franquet SA (Frankreich)
- Gilles S.A. (Belgien)
- Gomselmash (Belarus)
- Grimme Landmaschinenfabrik GmbH & Co. KG (Deutschland)
- Holmer Maschinenbau GmbH (Deutschland) – seit 2013 im Portfolio von Exel Industries[5]
- MATROT Equipements (Frankreich) – seit 2001 im Portfolio von Exel Industries, Produktion bis ca. 2012[5]
- Moreau-Agriculture (Frankreich) – seit 2007 im Portfolio von Exel Industries, Produktion bis ca. 2012[5]
- Ropa Fahrzeug- und Maschinenbau GmbH (Deutschland)
- Salzkottener Maschinenbau GmbH (Deutschland) – Produktion bis 2012, Übernahme durch die Grimme-Gruppe
- Wilhelm Stoll Maschinenfabrik (Deutschland) – Produktion eingestellt
- Thyregod A/S (Dänemark)
- Frans Vervaet B.V. (Niederlande)
Anzahl der verkauften Maschinen nach Hersteller[Bearbeiten | Quelltext bearbeiten]
2012:
- Grimme 80 Stück (Rexor, Maxtron und Rootster)[6]
- Holmer: 141 Stück (T2 und T3)[6]
- Ropa: 180 Stück[6]
- Vervaet: 28 Stück (Beeteater 26 T und Beeteater 17 T)[6]
Kritik[Bearbeiten | Quelltext bearbeiten]
Mit einem Gewicht von bis zu 60 Tonnen erzeugen Rübenroder eine extreme Bodenverdichtung. Dies kann sich negativ auf die Funktionsfähigkeit von Böden auswirken.[7]
Weblinks[Bearbeiten | Quelltext bearbeiten]
- DDR-Rübenerntemaschinen
- Interessante Bilder über Landtechnik in den Jahren 2001–2007
- Luftbild eines Rübenroders bei der Ernte
- Bryce Media: Holmer Terra Dos T3. Rübenernte 2011 auf YouTube, 23. September 2011 (Video eines selbstfahrenden Rübenroders bei der Ernte).
- Holmer Maschinenbau: HOLMER EasyLift - automatische Einzelreihentiefenführung beim Roden auf YouTube, 17. Februar 2020 (Animation und Teilschnitte des Erntekopfes).
Einzelnachweise[Bearbeiten | Quelltext bearbeiten]
- ↑ a b DLG-Pressemitteilung Nr. 34, 14. September 2005.
- ↑ a b Agrarwirtschaft Fachstufe Landwirt. 7. Auflage. BLV Verlagsgesellschaft, 2004, ISBN 3-405-16403-6.
- ↑ a b Food Forum, Magazin für Mitarbeiter der Südzucker-Gruppe, Ausgabe 53.
- ↑ ropa-maschinenbau.de − Historie von Hermann Paintner, Abschnitt 1986 (zuletzt abgerufen am 4. Juli 2017)
- ↑ a b c d exel-industries.com – Anual Report 2015. S. 4 (Zeitleiste), abgerufen am 31. Juli 2017 (PDF; 9,66 MB)
- ↑ a b c d eigene Angaben des Herstellers
- ↑ Verdichtung. Umweltbundesamt, 29. April 2019, abgerufen am 24. Januar 2021.