Klann-Mechanismus

Der Klann-Mechanismus ist ein planarer Mechanismus, der das Aussehen eines Tiers mit Beinen simuliert und das Rad ersetzt. Der Mechanismus besteht aus einem „Bein“, das in Kontakt mit dem Boden kommt, einer Kurbel, zwei Kipphebeln und zwei Stangen, die alle durch schwenkbare Verbindungen gekoppelt sind. Es wurde 1994 von Joe Klann als Erweiterung der Burmester-Kurven entwickelt, mit denen Vier-Stab-Doppelkippmechanismen wie z. B. Hafenkrane entwickelt wurden.[1][2]
Die Proportionen der einzelnen Glieder im Mechanismus werden definiert, um die lineare Bewegung des Fußes während der Hälfte der Kurbelumdrehung zu optimieren. Der Rest der Kurbelumdrehung ermöglicht es, den Fuß auf eine vorbestimmte Höhe anzuheben, bevor er in die Ausgangsposition zurückkehrt und den Zyklus wiederholt. Zwei Mechanismen, die mit der Kurbel gekoppelt und um einen halben Zyklus phasenverschoben sind, ermöglichen es dem Fahrgestell eines Fahrzeugs, sich parallel zum Boden zu bewegen.[3]
Klann-Mechanismen können Bordsteine überqueren, Treppen steigen oder sich in Bereichen bewegen, die derzeit für Fahrzeuge mit Rädern nicht zugänglich sind. Sie erfordern keine Mikroprozessorsteuerung oder mehrere Stellantriebe.[1]
Der Klann-Mechanismus ist ein Koppelgetriebe. Es wird z. B. für laufende Roboter verwendet und oft mit dem Jansen-Koppelgetriebe (Strandbeest) von Theo Jansen[4] und dem Tschebyschow-Lambda-Mechanismus verglichen.[5] Das Klann-Koppelgetriebe kann ebenso wie diese als eine angenäherte Geradführung angesehen und verwendet werden.
Konstruktionsvorschrift[Bearbeiten | Quelltext bearbeiten]
Die Konstruktionsvorschrift ist im US-Patent 6,260,862[6] beschrieben. Dort finden sich auch Koordinaten für die Konstruktion eines Beins.
| Point | X | Y | Beschreibung |
|---|---|---|---|
| Fixpunkte | |||
| 9 | 1,366 | 1,366 | Erste Kipphebelarmachse |
| 11 | 1,009 | 0,574 | Zweite Kipphebelarmachse |
| 15 | 1,599 | 0,750 | Kurbelachse |
| voll ausgefahrene Boden-Schrittstellung | |||
| 27X | 0,741 | 0,750 | Ellbogengelenk |
| 29x | 1,331 | 0,750 | Kurbel |
| 33x | 0,000 | 0,000 | Fuß |
| 35x | 0,232 | 0,866 | Kniegelenk |
| 37x | 0,866 | 1,500 | Hüftgelenk |
| geerdete Gangposition | |||
| 27Y | 1,277 | 0,750 | Ellbogengelenk |
| 29y | 1,867 | 0,750 | Kurbel |
| 33y | 1,000 | 0,000 | Fuß |
| 35y | 0,768 | 0,866 | Kniegelenk |
| 37y | 1,000 | 1,732 | Hüftgelenk |
-
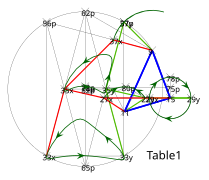 Illustriertes Beispiel Bein
Illustriertes Beispiel Bein -
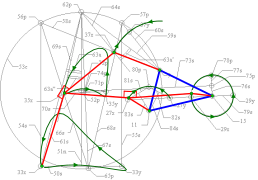 Bewegungspfade der einzelnen Punkte
Bewegungspfade der einzelnen Punkte -
 Ein Bein in verschiedenen Stellungen
Ein Bein in verschiedenen Stellungen -
 Benennung der Teile
Benennung der Teile -
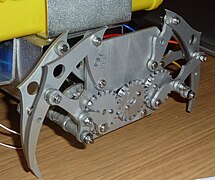 Unterwasser laufender Roboter
Unterwasser laufender Roboter -
![Kinetisches Kunstwerk – Mondo Spider[7][8]](//upload.wikimedia.org/wikipedia/commons/thumb/9/9a/Mondo_Spider.jpg/240px-Mondo_Spider.jpg)





![Kinetisches Kunstwerk – Mondo Spider[7][8]](/wiki/Datei:Mondo_Spider.jpg)
Vergleich mit dem Jansen-Koppelgetriebe[Bearbeiten | Quelltext bearbeiten]
Das Klann-Koppelgetriebe ist, anders als das Jansen-Koppelgetriebe, parametrierbar und dadurch flexibler anpassbar. Des Weiteren ist es robuster gegen Fertigungstoleranzen. So führen nicht optimale Längen zwar zu einem suboptimalen Schritt, aber weniger schnell zu einem Klemmen. Ein weiterer Vorteil des Klann-Koppelgetriebes ist, dass es mit weniger Beinen und Gelenken als das Jansen-Koppelgetriebe auskommt.[9][5]
Patente[Bearbeiten | Quelltext bearbeiten]
- U.S. Provisional Application Ser. No. 60/074,425, was filed on Feb. 11, 1998
- Patent US6260862: Walking device. Angemeldet am 17. Juli 2001, Erfinder: Joseph Klann.
- Patent US6364040: Walking device. Angemeldet am 2. April 2002, Erfinder: Joseph Klann.
- Patent US6478314: Walking device. Angemeldet am 12. November 2002, Erfinder: Joseph Klann.
Weblinks[Bearbeiten | Quelltext bearbeiten]
- Homepage ( vom 29. März 2010 im Internet Archive) von mechanicalspider.com
Einzelnachweise[Bearbeiten | Quelltext bearbeiten]
- ↑ a b https://de.frwiki.wiki/wiki/Mecanisme_de_Klann
- ↑ Jorge Lucendo: 80 Jahrhunderte von Erfindungen: Wörterbuch der Erfindungen. Jorge Lucendo, 23. April 2020, S. 83 (google.com [abgerufen am 16. April 2024]).
- ↑ A. Rajkumar: A microcontroller based spider bot using Klann mechanism. Band 2460, 1. August 2022, S. 030009, doi:10.1063/5.0096353 (harvard.edu [abgerufen am 16. April 2024]).
- ↑ https://de.dreamstime.com/stock-abbildung-spinnenroboter-unter-verwendung-jansen-mechanismus-und-klann-mechanismus-draufsicht-image43067101
- ↑ a b Marcus Strand, Rüdiger Dillmann, Emanuele Menegatti, Stefano Ghidoni: Intelligent Autonomous Systems 15: Proceedings of the 15th International Conference IAS-15. Springer, 2018, ISBN 978-3-03001370-7, S. 280 (google.com [abgerufen am 16. April 2024]).
- ↑ a b Patent US6260862: Walking device. Angemeldet am 17. Juli 2001, Erfinder: Joseph Klann.
- ↑ History | Mondo Spider. Abgerufen am 10. Dezember 2020.
- ↑ Frequently Asked Questions | Mondo Spider. Abgerufen am 10. Dezember 2020.
- ↑ Jansen Linkage - Klann Linkage Comparison ( vom 6. November 2014 im Internet Archive)