Lenkgetriebe

Das Lenkgetriebe ist ein Teil der Lenkanlage eines Kraftfahrzeuges und setzt die Drehbewegung des Lenkrades in eine Schwenkbewegung der Vorderräder um, in der Regel durch Verschieben der Spurstangen. Bei der Zahnstangenlenkung werden die Spurstangen von einer quer verschobenen Zahnstange, bei Lenkgetrieben mit Lenkstockhebel vom geschwenkten Lenkstockhebel bewegt.[1]
Geschichte
[Bearbeiten | Quelltext bearbeiten]Das erste Lenkgetriebe stammt von Carl Benz: Eine Handkurbel übertrug über eine Lenksäule (-welle), ein Ritzel und zwei Zahnstangen die Lenkbewegungen auf die Vorderradgabel.[2] Von Daimler wurde für den Regel-3-Tonner die Schraubenspindellenkung entwickelt.[3]
In den Nachfolgejahren wurden Schnecken- und Schraubenspindellenkgetriebe entwickelt,[4][5] sodass man in den 1920er Jahren die Lenkgetriebe nach diesen beiden Bauarten unterschied.[6] In den 1930er Jahren kam in Deutschland die Zahnstangenlenkung, insbesondere bei Fahrzeugen mit Frontantrieb, unter anderen DKW Meisterklasse und Adler Trumpf hinzu. Die 1940 bei General Motors begonnene Entwicklung der Kugelumlauflenkung (eine Schraubenspindellenkung mit rollender Reibung) wurde 1953 von ZF übernommen und zum Beispiel bei Pkw von Mercedes-Benz eingebaut.[2][3] Heute werden bei Pkw die Zahnstangenlenkung und bei Nutzfahrzeugen die Kugelumlauflenkung verwendet, in der Regel mit Servounterstützung.[7]
Einteilung
[Bearbeiten | Quelltext bearbeiten]
1 Lenkrad
2 Lenksäule
3 Ritzel und Zahnstange
4 Spurstangen
5 Radträger

Worm (Schnecke)
roller (Rolle)
Pitman arm (Lenkstockhebel)
_(14597343157).jpg)

Zahnstangenlenkung
[Bearbeiten | Quelltext bearbeiten]Die Zahnstangenlenkung enthält ein Zahnstangengetriebe. Ein vom Lenkrad gedrehtes Ritzel verschiebt die Zahnstange und diese die Spurstangen. Über ein gefedertes Druckstück wird die Zahnstange an das Ritzel gepresst, um Spiel zu vermeiden. Die Zahnstangenlenkung besteht aus wenigen Teilen (keine Zwischenteile zwischen Zahnstange und Spurstangen), weshalb sie billig zu produzieren und einfach zu montieren ist. In Personenwagen wird sie heute nahezu ausschließlich verwendet, wegen der großen Lenkkraft moderner Fahrzeuge und des generell gestiegenen Bedienungsanspruchs oft hydraulisch oder elektrisch unterstützt.[8] Man unterscheidet Zahnstangenlenkungen mit Mittelabgriff – beide Spurstangen laufen in der Fahrzeugmitte zusammen und sind nebeneinander am Ende der Zahnstange befestigt – und mit Seitenabgriff, das heißt an beiden Enden der Zahnstange ist je eine Spurstange angelenkt.[9] Mittenabgriff ist typisch für hoch (an der Spritzwand) angebrachte Zahnstangenlenkungen an Feder- oder Dämpferbeinvorderachsen und Aufhängungen an Schwingen, Seitenabgriff findet man an Doppelquerlenkerachsen, aber auch an Federbeinachsenen, dann ist die Lenkung weit unten, etwa in Höhe der Querlenker eingebaut. Durch die Anordnung mit möglichst langen Spurstangen oder gleicher Länge von Spurstange und Lenker verändert sich die Vorspur beim Einfedern nur wenig.
Schneckenlenkung
[Bearbeiten | Quelltext bearbeiten]Die Schneckenlenkung arbeitet mit einem Schneckengetriebe. Mit dem Lenkrad wird eine Schnecke gedreht, die das auf einen Sektor reduzierte Schneckenrad mit dem Lenkstockhebel dreht und die am Lenkstockhebel gelagerten Spurstangen verschiebt. Es gab verschiedene Konstruktionen von Schneckenlenkungen, kompakter oder auch mit verminderter Reibung:
- Bei der Finger- oder Ross-Lenkung ist das Schneckenrad als Sektor eines Kronenrades ausgebildet. Als Schneckenradzähne dienen ein oder zwei Lenkfinger mit rundem Querschnitt.[10] Sie stehen parallel zur Lenkstockhebelwelle und greifen seitlich in die Schnecke ein. Bei gegebener Übersetzung ist der Abstand zwischen Lenkwelle und Lenkstockhebel kleiner. David E. Ross erhielt 1925 in den USA ein Patent auf diese Konstruktion.[11] Wenn nur ein einzelner Finger im Eingriff steht, kann die Steigung des Schneckengewindes von der Mitte nach außen hin verändert sein (variable Lenkübersetzung, für geringere Lenkräfte bei eingeschlagenen Rädern). Lenkfinger können fest montiert, aber auch um ihre Achse drehbar gelagert sein, um durch den geringeren Rollreibungswiderstand im Kontakt mit der Schnecke die Lenkkräfte zu verringern. 1927 wurde die Ross-Lenkung erstmals in Nutzfahrzeugen eingebaut,[3] ZF Friedrichshafen erhielt die Patente für Deutschland und stellte Ross-Lenkungen von 1932 bis in die 1970er Jahre in Lizenz her.[12] Maurice und Georges Sizaire erhielten 1914 ein Patent auf eine ähnliche Konstruktion mit Schnecke und kugelgelagertem Lenkfinger.[4]
- Die Rollen- oder Gemmer-Lenkung (nach dem Hersteller Gemmer Manufacturing Co. in Detroit) ist eine von Henry Marles entwickelte Bauart. 1920 beantragte Marles ein Patent, das er 1926 erhielt.[13] Sie wird auch Schneckenlenkung mit Lenkrolle genannt. Das Schneckenrad trägt hier eine Rolle mit zwei oder drei umlaufenden Zähnen, die quer zur Welle des Lenkstockhebels gelagert ist. Die Achse der Rolle steht in Geradeausstellung der Lenkung parallel zur Schneckenwelle.[14] Die Schnecke ist als Globoidschnecke ausgeführt, das heißt, ihr Durchmesser nimmt zu den Enden hin zu, damit sie über den ganzen Lenkwinkel in die Rolle eingreifen kann. ZF Friedrichshafen erwarb 1953 die Patente für Deutschland und stellte die Gemmer-Lenkung in Lizenz her.
- Die Bishop-Lenkung ähnelt der Ross-Lenkung. Hier trägt der feststehende Finger eine wälzgelagerte Rolle, wodurch die Nut der Schneckenwelle breiter sein muss.[15] Das entsprechende Patent wurde dem britischen Ingenieur Reginald Bishop 1928 erteilt.[16]
Schraubenspindellenkung
[Bearbeiten | Quelltext bearbeiten]Bei der Schraubenspindellenkung wird durch das Drehen der Spindelschraube vom Lenkrad aus eine Spindelmutter (die Lenkmutter) verschoben. Die Mutter ist entweder außen als Zahnstange ausgebildet, die in ein entsprechendes auf dem Lenkstockhebel festes Zahnrad eingreift, oder sie ist über einen Zapfen mit einem Hebel auf der Welle des Lenkstockhebels verbunden. Vom Lenkstockhebel werden die Spurstangen verschoben. Bei diesem Lenkgetriebe gibt es oft keine Nachstellmöglichkeit, und die Reibung ist hoch.[3] Eine nachstellbare Spindellenkung wurde bis 1961 im VW Käfer verwendet. Die halbkugelförmige Spindelmutter saß in einer entsprechenden Fassung an der Lenkstockhebelwelle und wurde von oben an die Gewindespindel gedrückt.
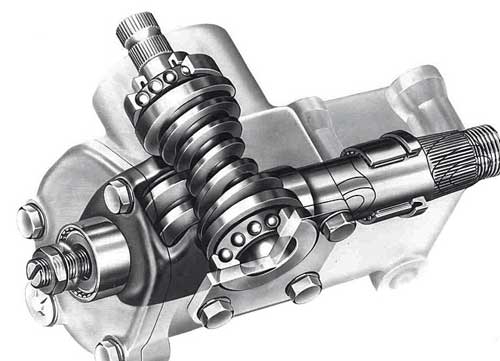
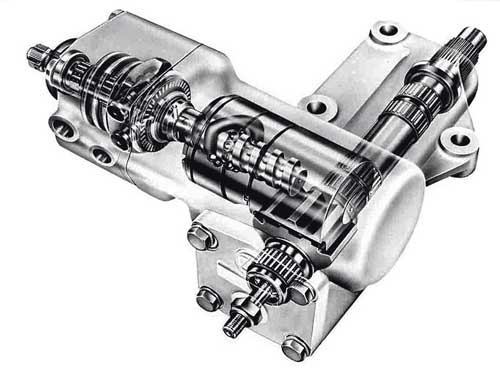
Kugelumlauflenkung
[Bearbeiten | Quelltext bearbeiten]Die Kugelumlauflenkung oder Kugelmutterlenkung ist eine besonders leichtgängige Schraubenspindellenkung. Sie enthält zwischen Spindelschraube und -mutter auf der Gewindebahn umlaufende Kugeln (Kugelgewindetrieb).[17][18] Der Rollwiderstand der rollenden Kugeln ist wesentlich geringer als die Gleitreibung im Gewinde eines Schraubgetriebes. Die Kugelumlauflenkung war früher auch bei Pkw der Mittel- und Oberklasse (zum Beispiel in der Mercedes-Benz Baureihe 124) verbreitet, inzwischen wird sie mit hydraulischer Servounterstützung („Hydrolenkung“) fast nur bei Nutzfahrzeugen verwendet.[8]
Literatur
[Bearbeiten | Quelltext bearbeiten]- Olaf von Fersen (Hrsg.): Ein Jahrhundert Automobiltechnik. Personenwagen. VDI Verlag 1986, ISBN 3-18-400620-4.
- Olaf von Fersen (Hrsg.): Ein Jahrhundert Automobiltechnik – Nutzfahrzeuge. VDI-Verlag, Düsseldorf 1987, ISBN 3-18-400656-5.
- Rolf Gscheidle: Fachkunde Kraftfahrzeugtechnik. 30. Auflage. Verlag Europa-Lehrmittel, Haan-Gruiten 2013, ISBN 978-3-8085-2240-0.
- Jörnsen Reimpell: (Hrsg.): Fahrwerktechnik: Lenkanlagen und Hilfskraftlenkanlagen. Vogel Buchverlag, Würzburg, 1. Auflage 1992, ISBN 3-8023-0431-4.
- Peter A. Weller: Fachkunde Kraftfahrzeugtechnik. 2. Auflage. Holland+Josenhans Verlag, Stuttgart 1982, ISBN 3-7782-3520-6.
Weblinks
[Bearbeiten | Quelltext bearbeiten]{kind=link}
{kind=link}
{kind=link}
Einzelnachweise
[Bearbeiten | Quelltext bearbeiten]- ↑ Jörnsen Reimpell: (Hrsg.): Fahrwerktechnik. S. 67.
- ↑ a b Olaf von Fersen: Ein Jahrhundert Automobiltechnik – Personenwagen., S. 390, 391.
- ↑ a b c d Olaf von Fersen: Ein Jahrhundert Automobiltechnik – Nutzfahrzeuge., S. 176, 177.
- ↑ a b Patent US1120096A: Steering-Gear. Angemeldet am 26. Mai 1914, veröffentlicht am 8. Dezember 1914, Erfinder: Maurice Sizaire, Georges Sizaire.
- ↑ Patent US1425753A: Steering mechanism for automobiles. Angemeldet am 17. Oktober 1921, veröffentlicht am 15. August 1922, Anmelder: General Motors Corp, Erfinder: Harry M. Denyes.
- ↑ Curt Hanfland: Der Neuzeitliche Maschinenbau. Verlag der Literaturwerke „Minerva“, Band 2, Leipzig 1928, S. 344.
- ↑ Peter A. Weller: Fachkunde Kraftfahrzeugtechnik. S. 262.
- ↑ a b Rolf Gscheidle: Fachkunde Kraftfahrzeugtechnik., S. 481.
- ↑ Karl-Ludwig Haken: Grundlagen der Kraftfahrzeugtechnik. ISBN 9783446228122, S. 101
- ↑ Bild einer Ross-Lenkung: [1]
- ↑ Patent US1567997A: Steering Gear. Angemeldet am 30. April 1924, veröffentlicht am 29. Dezember 1925, Anmelder: Ross Gear & Tool Co, Erfinder: David E. Ross.
- ↑ zf.com Von Muskelkraft bis autonom. (abgerufen am 14. Juni 2016)
- ↑ Patent US1584629A: Steering gear for mechanically-propelled vehicles. Angemeldet am 13. April 1920, veröffentlicht am 11. Mai 1926, Erfinder: Henry Marles.
- ↑ Bilder von Gemmer-Lenkungen: [2], [3]
- ↑ Patent US1673488A: Method of cutting steering gears. Angemeldet am 21. Mai 1924, veröffentlicht am 12. Juni 1928, Erfinder: Reginald Bishop.
- ↑ Patent GB223963A: Improvements in or relating to gearing for steering mechanically propelled vehicles and for other purposes. Angemeldet am 25. Juli 1923, veröffentlicht am 27. Oktober 1924, Erfinder: Reginald Bishop.
- ↑ Technologie der Kugelgewindetriebe, [4]
- ↑ Bilder der Kugelumlauflenkung [5], [6]
![[1]](http://www.oldtimertechnik-rubenbauer.de/6411_g.jpg){kind=link}
![[2]](http://www.02-club.de/technik/fahrwerk/gemmer.jpg){kind=link}
![[5]](http://www.oldtimerlenkungen.de/6409_g.jpg){kind=link}
![[6]](https://www.fordmuscle.com/archives/2002/07/steeringbox/images/reball.gif){kind=link}