Voith-Schneider-Antrieb





Der Voith-Schneider-Antrieb oder Voith-Schneider-Propeller (VSP) ist ein Schiffsantrieb, bei dem der Schub in der Größe und Richtung beliebig eingestellt werden kann, ohne dass die Drehzahl verändert wird. Die Steuerung erfolgt durch Einstellung der Steigung für die Richtung voraus–zurück (Fahrt) und durch die Einstellung quer zum Schiff (Ruder). Diese Art der Steuerung verleiht dem Schiff höchste Manövrierfähigkeit und erlaubt eine sehr feine Dosierung des Schubes und extrem schnellen Wechsel der Schubrichtung ohne Änderung der Drehzahl. Wird das Schiff mit zwei oder mehr VSP ausgerüstet, kann sich das Schiff in jede Richtung bewegen, auch seitlich (traversieren).
Erfunden wurde der Voith-Schneider-Antrieb von Ernst Schneider.[1] Entwickelt und produziert wird er seit 1926 von der Firma Voith in Heidenheim bzw. St. Pölten.
Technik[Bearbeiten | Quelltext bearbeiten]
Die Flügel des Voith-Schneider-Antriebs bewegen sich auf einer Kreisbahn und führen dabei eine zusätzliche überlagerte Schwenkbewegung aus. Die Drehachse des VSP steht senkrecht.
VSP arbeiten mit sehr geringen Drehzahlen. Sie betragen nur ca. 25 Prozent der Drehzahlen von Schraubenpropellern mit vergleichbaren Größen und Leistungen. Mit der geringen Drehzahl sind hohe Momente verbunden, die eine robuste Konstruktion nötig machen, was allerdings als Nachteil ein erhöhtes Gewicht mit sich bringt. VSP werden bis ca. vier Megawatt Leistungsaufnahme gebaut, mit Flügelkreisdurchmessern bis vier Meter. Die Flügellänge beträgt bis zu 82 Prozent des Flügelkreisdurchmessers. Der Antrieb erfolgt meist durch Dieselmotoren oder Elektromotoren.
Anders als beim Schraubenpropeller stehen Drehachse und Schubrichtung beim VSP senkrecht aufeinander. Deshalb existiert für den VSP keine bevorzugte Schubrichtung. Der Voith-Schneider-Antrieb ist ein Verstellpropeller, der eine stufenlose Variation des Schubes bezüglich Größe und Richtung ermöglicht. Da der VSP gleichzeitig Antriebs- und Steuerkräfte erzeugt, sind zusätzliche Anhänge – wie Wellenblöcke, Schiffsruder, Gondeln, Schäfte etc. – bei Schiffen mit VSP nicht erforderlich.
-
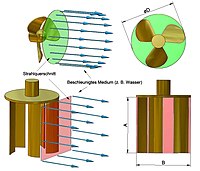 Strahlflächen (schematisch)
Strahlflächen (schematisch)

Die rechteckige Strahlfläche eines Voith-Schneider-Antriebs ist bei gegebenen Einbauverhältnissen in etwa doppelt so groß wie die einer Schraube. Als Strahlfläche wird der Querschnitt des vom Propeller beschleunigten Mediums (meist Wasser) bezeichnet.
Prinzip[Bearbeiten | Quelltext bearbeiten]
-
 Schwenkflügelpropeller (Prinzip)
Schwenkflügelpropeller (Prinzip)

Auf eine schräg mit einem Anstellwinkel α in die Strömung eines Fluids (Wasser, Luft etc.) gestellte oder aber in einem ruhenden Fluid bewegte Fläche (Schaufel, Flügel) wirken Kräfte: die Widerstandskraft (in Bewegungsrichtung) und der dynamische Auftrieb oder Vortrieb (quer zur Bewegungsrichtung). Diese Auftriebskraft kann mittels einer rotierenden Maschine genutzt werden, indem schräg angestellte Flächen sich auf einer Kreisbahn bewegen. Behalten die Flächen dabei jedoch ihren Winkel relativ zur jeweiligen Tangente bei, heben sich alle Kräfte auf. Daher muss der Anstellwinkel der Flächen während der Umlaufbewegung verändert werden. Zweckmäßig ist hierbei, dass einem positiven Anstellwinkel um 180° versetzt ein (nicht unbedingt gleich großer) negativer Anstellwinkel gegenübersteht (es gibt auch andere Konzepte, siehe[2] und Klappflügel-Rotor). In den beiden Bewegungsbereichen dazwischen verändert sich der Winkel kontinuierlich. Je größer der Anstellwinkel ist, desto größer ist der dynamische Auftrieb (gilt nur bis zu einer gewissen Grenze), dessen Kraft genutzt wird.
Die Flächen sind als symmetrische stromlinienförmige Körper ausgebildet, um die Widerstandskraft in Bewegungsrichtung (Kreisbahn) zu minimieren. Auch die Verwendung von Tragflächenprofilen ist möglich.[3] In diesem Fall wird durch das Profil auf der einen Seite der Kreisbahn der dynamische Auftrieb gegenüber dem des schräg angestellten symmetrischen Strömungskörpers verstärkt. Auf der gegenüberliegenden Seite (um 180° versetzt) ist jedoch praktisch nur die Schräganstellung des Profils wirksam.
Schneider hat erkannt und beschrieben, dass ein solcher Propeller in einfacher und vorteilhafter Weise (verglichen mit anderen Schwenkflügelprinzipien) gesteuert und als Schiffsantrieb verwendet werden kann. Die von ihm vorgeschlagene Steuereinrichtung liegt im Inneren des Rotorkreises. Ein kompakter Aufbau ist so möglich.
Der Voith-Schneiderpropeller (VSP) kann prinzipiell als Turbine, als Pumpe bzw. Gebläse oder als Antrieb genutzt werden.
Nutzung als Turbine[Bearbeiten | Quelltext bearbeiten]
Der ortsfeste Rotor wird vom Fluid in einer Richtung angeströmt und durch die erzeugte Kraft in Bewegungsrichtung (tangential) in Drehung versetzt (Drehmoment). Aus der Strömung (z. B. Wind, Wasser) wird Energie gewonnen. Im Gegensatz zu üblichen Windkraftanlagen mit vertikaler Rotationsachse (Savoniusrotor, Darrieusrotor etc.[4]) muss ein VSP jedoch in den Wind (bzw. in die Strömungsrichtung des Wassers) gedreht oder aber durch Leitlagerverstellung (siehe unten) entsprechend ausgerichtet werden. Eine vertikale Rotationsachse ist zweckmäßig, aber nicht zwingend notwendig. Anwendungen als Turbine sind bisher nicht bekanntgeworden.
Nutzung als Pumpe/Gebläse[Bearbeiten | Quelltext bearbeiten]
Der ortsfeste Rotor wird motorisch angetrieben und in Drehbewegung versetzt. Es entsteht eine Kraft auf das Fluid und eine Strömung in einer Richtung. Die Rotationsachse kann eine beliebige Lage aufweisen. In neuester Zeit ist vorgeschlagen worden, Flettner-Rotoren mit Schneiderrotoren anzuströmen, um ein kurzstartfähiges Flugzeug zu realisieren.[5][6]
Nutzung als Antrieb[Bearbeiten | Quelltext bearbeiten]

Ein an einem Wasserfahrzeug montierter VSP (vertikale oder annähernd vertikale Rotationsachse) wird motorisch angetrieben. Der unterhalb des Fahrzeugs angeordnete und im Wasser rotierende Propeller (oder mehrere) erzeugt einen Vortrieb in einer Richtung, der zum Antrieb des Schiffes verwendet werden kann.
- Prinzipiell kann aber auch ein Fahrzeug angetrieben werden, wenn die Rotation des VSP (beliebige Drehachse) nicht im Wasser, sondern in Luft stattfindet (das trifft für Wasser-, Land- oder Luftfahrzeuge zu). An entsprechenden Luftfahrzeugen experimenteller Natur wurde und wird bereits seit Beginn des 20. Jahrhunderts gearbeitet (gegenwärtig in verstärktem Maße unter den Bezeichnungen Cyclocopter, Cyclorotor oder Cyclogyro)[7][8][9]. Im Gegensatz zur oben genannten indirekten Verwendung des VSP für die Realisierung eines Luftfahrzeugs (Flettnerrotor-Anströmung mit VSP-Gebläse) erfordert die direkte Nutzung eines VSP für die Auftriebs- bzw. Vortriebserzeugung eines Fluggerätes jedoch ggf. sehr hohe Drehzahlen (Problem: Beherrschung von Unwuchten).
Derzeit wird der Schneiderrotor serienmäßig ausschließlich für den Antrieb von Schiffen eingesetzt. Die Fahrtrichtung (ohne Ruder) und die Fahrgeschwindigkeit (ohne Drehzahländerung) können einfach und schnell geändert werden. Die Kinematik dieser Steuerung wird nachfolgend beschrieben.
Kinematik[Bearbeiten | Quelltext bearbeiten]
-
 Steuerung (Geschwindigkeit)
Steuerung (Geschwindigkeit) -
 Steuerung (Fahrtrichtung)
Steuerung (Fahrtrichtung)


Die Schaufeln rotieren um den Mittelpunkt M des Umlaufkreises und können jeweils um den Schwenkpunkt S verschwenkt werden. Eine Verbindungslinie von den Schwenkpunkten zu einem gegenüber M verschobenen Leitpunkt L (Stellung a) muss stets einen rechten (oder annähernd rechten) Winkel mit den Symmetrieachsen der Schaufeln bilden. Es ist ersichtlich, dass die Schaufeln unter dieser Bedingung bei einem Umlauf verdreht werden und in den Bereichen ihrer Schrägstellung gegenüber der jeweiligen Tangente an den Umlaufkreis ein dynamischer Auftrieb in gleicher Richtung erzeugt wird, der einen Vortrieb zur Folge hat. Wird der Leitpunkt L weiter vom Mittelpunkt entfernt (Stellung b), vergrößert sich die Schrägstellung der Schaufeln und somit auch der Vortrieb. Allein durch die Verlagerung des Leitpunktes kann somit die Geschwindigkeit des Schiffes erhöht werden (ohne Drehzahländerung des Motors, die selbstverständlich auch vorgenommen werden kann). Wird L um einen Winkel β um M verdreht, verlagert sich auch die Vortriebskraft und damit die Fahrtrichtung um diesen Winkel. Bei Verdrehung von L um 180° (bzw. Verschiebung über M hinweg) ändert sich die Fahrtrichtung von vorwärts auf rückwärts (bzw. umgekehrt).
-
Realisierung des Schneiderprinzips
Realisiert werden kann das Prinzip in einfacher Weise, wenn jede Schaufel starr mit einer Stange verbunden ist, die sich in einem drehenden Leitlager linear gleitend bewegen kann (siehe Animation für eine Schaufel).
Sinnvoll ist es jedoch, das Prinzip dahingehend zu erweitern, dass kinematische Konzepte, die durch Verlagerung eines Leitlagers andere (geeignete) Schaufelanstellungen bewirken und damit Geschwindigkeitsänderungen bzw. Fahrtrichtungsänderungen zur Folge haben, als Möglichkeit für die Realisierung eines VSP anzusehen. Der gedachte Leitpunkt L* (bzw. die gedachte Leitachse) ist nun nicht mehr identisch mit dem auch hierbei vorhandenen realen Leitlager, sondern wandert hin und her.[10]
-
 VSP mit Gestänge
VSP mit Gestänge -
VSP mit Gestänge
-
 VSP mit Koppelgetriebe
VSP mit Koppelgetriebe -
VSP mit Koppelgetriebe


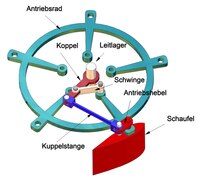
Um eine solche Kinematik zu realisieren, werden sogenannte Koppelgetriebe (Gestängegetriebe) verwendet. Deren Einzelteile sind durch Gelenke verbunden.
Im Bild ist schematisch eine einfache Realisierungsmöglichkeit dargestellt. Die Schaufeln sind über Arme A mit dem Leitlager, das den Leitpunkt bzw. die Leitachse darstellt, verbunden. Die Arme können sich unabhängig voneinander um das Leitlager drehen, auf dem sie gestapelt angeordnet sind. Die Schaufeln sind im motorisch angetriebenen Antriebsrad um ihre Achsen S drehbar gelagert und über Hebel H und Gelenke G mit den Armen verbunden. In der Animation ist gezeigt, dass sich ein Antrieb in bestimmter Richtung ergibt.
Etwas komplizierter ist das in einem weiteren Bild dargestellte Konzept. In der Animation ist der Umlauf einer von einem Koppelgetriebe bewegten Schaufel gezeigt. Koppelgetriebe sind vielfach variierbar, so dass für jede gewünschte Schaufelverstellung eine Realisierungsmöglichkeit gefunden werden kann.[11][12]
Im Beispiel ist eine Variante dargestellt, bei der ein größerer Antriebsbereich wirksam wird.
-
 Steuerung eines VSP
Steuerung eines VSP

Um den Antrieb in der oben beschriebenen Weise zu steuern (also das Leitlager zu bewegen), ist das Leitlager mit einem Kalottenlager ausgestattet. Ein mit drei kugelförmigen Bereichen versehener Steuerzapfen greift mit einer Kugel in dieses Kalottenlager. Die mittlere Kugel ist in einem gestellfesten Lager gehaltert, während die obere Kugel in einem von zwei rechtwinklig angeordneten Hydraulikzylindern verschiebbaren Lager geführt wird (siehe Bild). Der Steuerzapfen ist um sein mittleres Kalottenlager allseitig schwenkbar. Die Hydraulikzylinder werden mit Hilfe eines Steuerknüppels bzw. Joysticks angesteuert. Auf diese Weise ist das Leitlager in der jeweils geforderten Weise verschiebbar. Mit der Bewegung des Knüppels werden, wie oben beschrieben, sowohl Fahrtrichtung als auch Geschwindigkeit gesteuert.
-
 Zykloidenbahn einer Propellerschaufel
Zykloidenbahn einer Propellerschaufel -
Zykloidenbahn einer Propellerschaufel (die Antriebsbereiche sind rot gekennzeichnet)
-
 Anordnungen von VSP
Anordnungen von VSP


Bei Bewegung des Schiffes (und damit des Rotors) mit einer bestimmten Geschwindigkeit bewegen sich die Schaufeln aufgrund der Rotation des Rotors auf einer Zykloidenbahn durch das Wasser. VSP werden deshalb auch als Zykloidalpropeller oder -rotoren bezeichnet. Die Form der Zykloide hängt vom Verhältnis der Schiffsgeschwindigkeit zur Rotationsgeschwindigkeit des Rotors ab.
Es wurde auch die Möglichkeit in Betracht gezogen, jede Schaufel einzeln mit einem Stellmotor zu bewegen.[13] Auf ein Koppelgetriebe für die Schaufelansteuerung könnte dann verzichtet und die Schaufelverstellung z. B. von einem Computer vorgenommen werden (Problem: Energie- und Signalübertragung an die Stellmotoren). Ein Leitlager und seine mechanische Verstellung wären verzichtbar. Über die Realisierung einer solchen Lösung ist nichts bekannt.
Zu erwähnen ist noch, dass der rotierende Radkörper (mit Gestänge) in einer zylindrischen Umhüllung gekapselt und so gegen Seewasser geschützt ist. Die durch die Umhüllung ragenden Schaufeln und das Lager für den Radkörper sind durch Dichtungsmanschetten abgedichtet.[14] Im eingangs gezeigten Foto ist der Radkörper schwarz, während die stillstehenden Teile mit blauer Farbe versehen sind.
Je nach Verwendungszweck kann ein Schiff mit einem oder mehreren Propellern ausgerüstet sein, die an geeigneten Stellen am Schiffsrumpf angeordnet sind (siehe Bild). Meist kommen zwei gegenläufige VSP zur Anwendung. Bei nur einem Propeller (oder ungerader Propelleranzahl) übt der VSP (bzw. einer der VSP) auf den Schiffsrumpf ein Drehmoment aus, das die Schiffslängsachse zu verdrehen sucht. Dem steht jedoch einerseits der gegen den Rumpf wirkende große Widerstand des Wassers entgegen, andererseits kann diesem Moment durch geringfügige Winkelverstellung des VSP-Schubvektors (der Propeller-Strahlrichtung) gegen die Schiffslängsachse begegnet werden. Im Bild ist das für ein Schiff mit nur einem VSP dargestellt. Bei geradzahligen gegenläufigen VSP heben sich die Momente auf (gleiche gegenläufige Drehzahl und gleiche Leitlagerverschiebung der gepaarten VSP vorausgesetzt).
Beispiele für Schiffe mit nur einem VSP sind die Schlepper „Castor“[15] und „Regina“[16]. Zwei VSP verwenden die Voith-Wassertrecker (siehe obiges Bild des Schleppers "Stier"), während Doppelendfähren mit zwei bis vier Propellern ausgerüstet werden[17]. Die Fähre „Norderaue“ ist mit vier Propellern versehen.
Verwendung[Bearbeiten | Quelltext bearbeiten]

Wegen seiner ausgezeichneten Eigenschaften zur Erhöhung der Manövrierbarkeit von Schiffen und seiner sehr guten Steuerbarkeit wird der Voith-Schneider-Antrieb bei Schleppfahrzeugen, Doppelendfähren, Fahrgastschiffen, Tonnenlegern, Schwimmkränen, Bohrinselversorgungsschiffen, Bugsteuermodulen und solchen Fahrzeugen eingesetzt, die hohe Manövrierfähigkeit benötigen oder gegen Wind, Strömung und Wellen auf der Stelle gehalten werden müssen (dynamic positioning). Im Binnenschiffbau kommt der Voith-Schneider-Antrieb auch beim Antrieb von Schubverbänden zur Anwendung. Im militärischen Einsatz wird der Propeller bei Minensuchbooten verwendet. Schon vor dem Zweiten Weltkrieg waren zwei Minensuchboote Typ 1935 sowie teilweise die Minenräumboote in der nach dem Krieg so bezeichneten Capella-Klasse mit je zwei Voith-Schneider-Antrieben ausgerüstet.
Literatur (Auswahl)[Bearbeiten | Quelltext bearbeiten]
- Kurt Benz: Der Voith-Schneider-Propeller als Schiffsmodellantrieb. Scholz, Wolfsburg 1980, ISBN 3-922414-10-9.
- Theodor Vieweg: Der VSP-Antrieb im Schiffsmodell. Neckar-Verlag, Villingen-Schwenningen 1983, ISBN 3-7883-0187-2.
- Birgit Jürgens, Werner Fork: Faszination Voith-Schneider-Propeller. Geschichte und Technik. Koehlers Verlag, Hamburg 2002, ISBN 3-7822-0854-4.
Weblinks[Bearbeiten | Quelltext bearbeiten]
- kurze Beschreibung vom Hersteller
- interaktives Voith-Schneider-Propeller-Programm, Funktionsvorführung zum Testen
Einzelnachweise[Bearbeiten | Quelltext bearbeiten]
- ↑ Patent DE453823C: Schaufelrad. Angemeldet am 5. Juni 1926, veröffentlicht am 19. Dezember 1927, Erfinder: Ernst Schneider.
- ↑ Patent DE413896C: Ganz in das Medium eingetauchtes Schaufelrad. Angemeldet am 8. November 1922, veröffentlicht am 18. Mai 1925, Erfinder: Kurt F. J. Kirsten.
- ↑ Patent EP0795466: Zykloidalsysteme mit Doppel- bzw. Mehrfach-Flügelsystemen. Angemeldet am 17. September 1997, veröffentlicht am 18. Juli 2001, Anmelder: Voith Hydro GmbH, Erfinder: Amelang Andreas.
- ↑ Achmed Khammas – Das Buch der Synergie – Teil C – BESONDERE WINDENERGIESYSTEME. Abgerufen am 22. November 2017.
- ↑ Patent EP1964774: Fluggerät mit rotierenden Zylindern zur Erzeugung von Auftrieb und/oder Vortrieb. Angemeldet am 27. Februar 2008, veröffentlicht am 3. September 2008, Anmelder: Bauhaus Luftfahrt E.V., Erfinder: Jost Seifert.
- ↑ Patent DE102007009951: Fluggerät mit rotierenden Zylindern zur Erzeugung von Auftrieb und/oder Vortrieb. Angemeldet am 1. März 2007, veröffentlicht am 31. Juli 2008, Anmelder: Bauhaus Luftfahrt e. V., Erfinder: Jost Seifert.
- ↑ Ohne Titel. rotoplan, 19. Mai 2007, abgerufen am 17. November 2021.
- ↑ A New Dawn in Vertical Mobility. Abgerufen am 20. Oktober 2021.
- ↑ David Hambling: After More Than a Century, the Cyclocopter Is Making a Comeback. 5. April 2019, abgerufen am 17. November 2021 (amerikanisches Englisch).
- ↑ Patent DE704008C: Schaufelrad. Angemeldet am 12. März 1937, veröffentlicht am 21. März 1941, Anmelder: Fa. J. M. Voith, Erfinder: Hans Müller, Ernst Schneider.
- ↑ Patent DE19811251C1: Zykloidalpropeller. Angemeldet am 14. März 1998, veröffentlicht am 29. Juli 1999, Anmelder: Voith Hydro GmbH & Co KG, Erfinder: Harald Gros.
- ↑ Patent EP0785129B1: Zykloidalpropeller, insbesondere als Schiffsantrieb. Angemeldet am 24. Dezember 1996, veröffentlicht am 27. März 2002, Anmelder: Voith Hydro GmbH, Erfinder: Herbert Perfahl.
- ↑ Patent DE500340C: Schaufelrad mit beweglichen Schaufeln. Angemeldet am 19. August 1927, veröffentlicht am 3. Juli 1930, Anmelder: Fa. J. M. Voith.
- ↑ Patent DE4337761C2: Rotierendes Maschinenteil, insbesondere Rotor eines Zykloidal-Schiffspropellers. Angemeldet am 5. November 1993, veröffentlicht am 21. September 1995, Anmelder: J. M. Voith GmbH, Erfinder: Werner Fork.
- ↑ CASTOR (IMO 5136622) am 30.8.2015, Hamburg, Hansahafen, Bremerkai, Hafenmuseum Schuppen 50 / Ex-Name: GRÖPELINGEN (URAG) Schlepper / BRT ... - Schiffbilder.de. Abgerufen am 31. Januar 2021.
- ↑ NOK Schiffsbilder - Bilder. Abgerufen am 31. Januar 2021.
- ↑ Fähren & Passagierschiffe | Voith. Abgerufen am 31. Januar 2021 (zu "Optionen" scrollen).