Astronomische Navigation
.jpg)
Astronomische Navigation ist der Überbegriff für alle Verfahren der Positionsbestimmung, die auf der Messung von Gestirnen (Sonne, Mond, Planeten oder ausgewählten Fixsternen) beruhen. Sie eignet sich für Anwendungen auf dem Festland, in der Nautik und in der Luftfahrt.
Auch einige astronomisch gestützte Methoden der Richtungsmessung und ‑kontrolle zählen zum Fachgebiet.
Prinzip der Methode[Bearbeiten | Quelltext bearbeiten]

*: Sonne (da die Entfernung um ein Vielfaches größer ist, als die Größe der Erde, ist die Blickrichtung für Beobachter in Z und O im Rahmen der Messgenauigkeit parallel.)
Z: Ort, über dem die Sonne im Zenit steht
O: unbekannter Standort des Beobachters
O′: Menge der möglichen Standorte des Beobachters nach erster Messung
Die Astronomische Navigation ist eine Positionsbestimmung mit Sextant, Chronometer und astronomischem Almanach. Mit einem Sextanten misst ein ruhender Beobachter die scheinbare Höhe eines Gestirns (wozu auch Sonne, Mond oder Planeten zählen) über dem Horizont – auf See über der Kimm – den sogenannten Höhenwinkel h. Gleichzeitig wird mit einem Chronometer oder synchronisierter Stoppuhr der sekundengenaue Zeitpunkt der Messung in Koordinierter Weltzeit (UTC) erfasst.
Für die Standortbestimmung wird der komplementäre Winkel ζ = 90°− h berechnet (also anstatt des messbaren Winkelabstandes zum Horizont der entsprechende Winkel zum Zenit errechnet) – die sogenannte Zenitdistanz.
In Tabellen wie dem Nautical Almanac wird ermittelt, über welchem Punkt Z der Erdoberfläche das beobachtete Gestirn zum Messzeitpunkt genau im Zenit stand – der sogenannte Bildpunkt (geometrisch der Fußpunkt). Da der gemessene Höhenwinkel normalerweise nicht 90° beträgt, sondern 90° − ζ, muss sich der eigene Standort O auf einem Kreisbogen O mit einem durch den Winkel ζ bestimmten Abstand vom Punkt Z befinden – an einem der Orte also, an dem das Gestirn unter dem gemessenen Winkel erscheint. Da auf dem Globus Winkel- und Entfernungsangaben einander entsprechen, beträgt dessen Radius ζ * 60 Nautische Meilen (1 nm = 1/60 Grad).
Um einen eindeutigen Standort bestimmen zu können, muss die Messung mit einem anderen Gestirn (oder bei Messung des gleichen Gestirns mit einem ausreichenden zeitlichen Abstand) wiederholt werden. Diese liefert einen weiteren Punkt Z2, sowie einen zweiten Kreis mit einem durch ζ2 bestimmten Radius. Die beiden Kreise haben zwei (idealerweise sehr weit entfernte) Schnittpunkte, von denen lediglich einer als eigener Standpunkt infrage kommt.
Prinzip der seemännischen Praxis[Bearbeiten | Quelltext bearbeiten]

Die beiden Kreise der möglichen Beobachterstandorte O′ werden abgetragen und deren Schnittpunkte ermittelt.
Anmerkung: Die Kreise sind hier aufgrund der Kartenprojektion verzerrt dargestellt – beim theoretischen Abtragen auf einem Globus wären beide Kreise tatsächlich kreisrund. (Siehe auch obige Darstellung) Dies ist (neben dem groben Maßstab) ein weiterer Grund, warum ein Abtragen der Kreise mit einem Zirkel auf der Karte kaum praktikabel ist.
Bei der zeitlich versetzten Messung desselben Gestirns (etwa der Sonne) ist nachteilig, dass man Messungen mit ausreichend großem Zeitabstand (möglichst 3–4 Stunden oder Winkel > 45°) benötigt, da sonst die Standlinien einen schleifenden Schnittwinkel bilden und ungenau werden. Dieser Zeitabstand kann speziell bei unsicherem Wetter nicht immer eingehalten werden. Zudem ist eine mögliche zwischenzeitliche Ortsveränderung (Versegelung) zu berücksichtigen – diese kann je nach Bedingungen relativ genau abgeschätzt (gegisst) werden, bringt aber eine zusätzliche Ungenauigkeit ein.
Günstiger sind deshalb zeitnah ausgeführte Messungen zu unterschiedlichen Gestirnen. Bei Tage sind zwar auch helle Sterne im Sextanten nur selten zu sehen, wohl aber oft der Mond und die Venus. Optimal ist untertags die Ortsbestimmung bei Halbmond, weil dann Sonne und Mond einen Winkel von etwa 90° einnehmen und zeitnah beide Messungen am Tag durchgeführt werden können. Neu- und Vollmond hingegen sind für die Ortsbestimmung auf See unbrauchbar.
Sternmessungen sind vor allem in der Zeit um Sonnenauf- bzw. Untergang möglich – bis zum Beginn bzw. dem Ende der nautischen Dämmerung, in der neben den helleren Sternen ebenfalls der für die Höhenbestimmung unabdingbare Horizont erkennbar bleibt. Von den im Nautical Almanac enthaltenen 60 Navigationssternen gibt es immer einige, deren gegenseitiger Winkel etwa 90° ist und deren Standlinien sich daher gut schneiden. Ein dritter Stern empfiehlt sich als Kontrolle. Beim Verfahren, wie es zur Verwendung der HO-249 Band 1 „selected stars“ sinnvoll ist, wird versucht, drei Fixsterne zu wählen, deren Azimute sich jeweils um 60° unterscheiden. Solche Sternkonstellationen sind dort ebenso hervorgehoben wie besonders helle Sterne. Es ist sinnvoll, die Messungen in der Dämmerungszeit von Ost nach West durchzuführen, um das zur Verfügung stehende Zeitfenster, in dem der Horizont und die Sterne sichtbar sind, optimal zu nutzen, denn die Sterne sind bei Sonnenuntergang als erstes im Osten und bei Sonnenaufgang als letztes im Westen zu sehen. – Zum Auffinden und identifizieren der Sterne wurde vereinzelt der praktische „U.S. Star Finder and Identifier No. 2102 D“, herausgegeben vom U.S. Navy Hydrographic Office, Washington,[1] benutzt.
In der Praxis stellt sich das Problem, dass in der Regel auf keiner Karte mit sinnvoll nutzbarem Maßstab die Kreise um die Bildpunkte der Gestirne eingezeichnet werden können, da die Abstände der Bildpunkte und der Schnittpunkte meist mehrere tausend Seemeilen voneinander entfernt sind. Beispielsweise wandert der Bildpunkt der Sonne (je nach Jahreszeit auf unterschiedlicher geografischer Breite zwischen den beiden Wendekreisen) mit 1667 km/h bzw. 900 kn von Ost nach West.
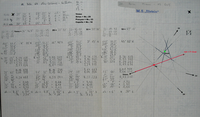
Daher wird für die tatsächliche Bestimmung auf hoher See in die Seekarte, besser in eine mercatorskalierte Leerkarte (vgl. Skizzen rechts in den Bildern), zunächst eine Schätzposition (Rechenort oder gegisster Ort) eingezeichnet. Für den Bildpunkt des Gestirns, dessen Höhenwinkel man gemessen hat, zeichnet man dann das für die Schätzposition berechnete Azimut (Horizontalwinkel) ein, ausgehend von der Schätzposition. Gleichzeitig berechnet man die Entfernung zwischen Bildpunkt und Schätzposition (berechnete Höhe) und trägt die Differenz zwischen berechneter Höhe und beobachteter Höhe (korrigierter Sextantenwinkel) auf dem Azimutstrahl ausgehend vom Schätzort auf. Die gesuchte Standlinie ist ein Kreis durch diesen Punkt, wobei der Bildpunkt des beobachteten Gestirns den Kreismittelpunkt darstellt. Um die zeichnerische Konstruktion zu vereinfachen, ersetzt man das Kreisbogenstück durch die Tangente an den Kreis, die rechtwinklig an den Azimutstrahl konstruiert wird.
Die Werte der Beobachtung eines zweiten Gestirns führen zu einer zweiten geraden Standlinie, der Schnittpunkt beider Standlinien gilt dann als gesuchter Ort. Werden drei Gestirne beobachtet, bilden die Standlinien im Allgemeinen ein Dreieck, dessen Mitte man als gesuchten Ort betrachtet.
Für die Berechnung des Azimuts und der Entfernung zum Gestirns-Bildpunkt benötigt man die Lehrsätze der sphärischen Trigonometrie, speziell die des nautischen Dreiecks. Man kann die Ergebnisse der notwendigen Rechenoperationen aber auch aus mehrbändigen Tabellenwerken (Pub. 249 bzw. Pub. 229 Sight Reduction Tables for Marine Navigation bzw. for Air Navigation), der amerikanischen National Geospatial-Intelligence Agency[2] mit anschließender Interpolation ermitteln.
Umsetzung der seemännischen Praxis[Bearbeiten | Quelltext bearbeiten]
Oben genanntes Tabellenwerk, das bei der Handelsschifffahrt unter dem Begriff „HO-Tafeln“ rangierte, stellte für die Berechnung des Schiffstandortes eine wesentliche Erleichterung dar. Bis etwa Mitte der 1960er Jahre wurde in der Praxis fast ausschließlich mit Nautischen Jahrbüchern (Ephemeriden) und Nautischen Tafeln, die Logarithmen- und weitere Hilfstabellen enthielten, „zu Fuß“ gerechnet; eine komplette Standortbestimmung mittels dreier Gestirne – siehe rechts – dauerte daher einschließlich der Beobachtung ca. 40 bis 45 Minuten. Später mit den HO-Tafeln konnte man Gleiches mühelos in etwa 10 Minuten schaffen. Allerdings duldeten manche älteren Kapitäne das neue amerikanische Verfahren nicht.
Um auf deutschen Seefahrtschulen zu Kapitänslehrgängen (A6/AG) zugelassen zu werden, mussten bezüglich der astronomischen Beobachtungen gesetzliche Bestimmungen erfüllt werden.
- Astronomische Navigation an Bord eines Seeschiffes – 1963
-

-

-
-
 Astronomische Schiff-Standort Berechnung, 2 Fixsterne + Polarstern
Astronomische Schiff-Standort Berechnung, 2 Fixsterne + Polarstern



.png)
Beschickung des Sextanten[Bearbeiten | Quelltext bearbeiten]
Der mit dem Sextanten gemessene Winkelabstand h zwischen dem sichtbaren Horizont (der sogenannten Kimm) und dem Gestirn muss mehrfach korrigiert werden, bevor er zur Berechnung der Position benutzt werden kann:
- Bei der Beobachtung von Sonne und Mond muss noch der halbe Durchmesser (ca. 16′) des Gestirns hinzugefügt oder abgezogen werden, je nachdem ob man die Unter- oder Oberkante beobachtet hat.
- Die Höhe des Beobachters über dem Meeresspiegel, die sogenannten Augeshöhe – sie macht die Kimm überhaupt erst sichtbar – lässt einen zu großen Winkel messen (die Kimmtiefe).
- Die Lichtstrahlen der Gestirne werden in der Atmosphäre gebrochen. Diesen Effekt nennt man Refraktion, hier speziell Astronomische Refraktion und er ist umso stärker, je tiefer das Gestirn steht (je näher an der Kimm). Wenn die Sonne scheinbar untergeht, ist sie in Wahrheit schon etwa 0,6° tiefer. Die Refraktion nimmt für kleine Winkel stark zu (bei 5 Grad rund 10′) und hängt von Lufttemperatur und ‑druck ab. Deshalb vertraut der Navigator einer Messung bei Kimmabstand unter 10 Grad nur eingeschränkt.
- Die Formel ζ = 90° − h gilt nur für unendlich weit entfernte Objekte. Der dadurch verursachte Fehler heißt Horizontalparallaxe. Sie ist bei der Astronavigation mit Sonne und Fixsternen vernachlässigbar, aber nicht für die Planeten (Korrekturen bis etwa 0,5′) und besonders beim Mond (bis zu 1°02′).
Werte für diese Korrekturen finden sich ebenfalls als Tabellen im nautischen Almanach, die als „Gesamtbeschickung für den Kimmabstand des Sonnenunterrandes“, „Gesamtbeschickung für den Kimmabstand eines Fixsterns oder Planeten“ und „Gesamtbeschickung für den Kimmabstand des Mondunterrandes“ sowie „Zusatzbeschickungen“ bezeichnet sind.
[Bearbeiten | Quelltext bearbeiten]
Mit Hilfe einer sekundengenauen Uhr, des aktuellen Almanach und eines handelsüblichen Sextanten erreicht ein geübter Beobachter bei idealen Bedingungen Genauigkeiten der Sternmessung von 1′ und in der Position 1–2 Seemeilen. In der Praxis sind die Bedingungen selten ideal:

- An Bord von Schiffen steht man auf etwas schwankendem Untergrund. Der Marine- oder Spiegelsextant kann das großteils ausgleichen (Gestirn und Kimm bleiben fast in Deckung), doch nur solange sie nicht aus dem Gesichtsfeld heraus wackeln.
- Wolken und Dunstschleier behindern oft die Sicht auf die Gestirne. Astronavigation ist aber nur möglich bei zumindest teilweise freiem Himmel. Günstiger als im Schnitt sind hier die Rossbreiten (15–30° Breitengrad) und hohe Breiten.
Die 60 Navigationssterne im Almanach reichen zwar auch bei halber Bewölkung aus, sind aber nicht immer identifizierbar. - Der Nachthimmel am Meer ist nicht deutlich heller als die Kimm, sodass Höhenmessungen unsicher sind – auch wenn die Kimm scheinbar gut wahrnehmbar ist. Mit üblichen Sextanten sind daher Sterne und Planeten nur in der Morgen- und Abenddämmerung genau messbar. Ein Blasensextant (mit eingespiegelter, beleuchteter Libelle) schafft hier Abhilfe.
- Tief stehende Gestirne sind im Sextanten zwar leichter zu finden als hohe, für die Berechnung aber unsicherer.
Ein Beispiel aus der Praxis zeigt nebenstehende Berechnung/Skizze. – Hier erkennt man sofort, dass Koppelort Og und beobachteter Ort Ob weit auseinander liegen. – Dies ist das Beobachtungsergebnis nach 3 Tagen anhaltend schlechtem Wetter (Winter Nordatlantik) mit geschlossener Wolkendecke und keiner Möglichkeit einer astronomischen Ortsbestimmung. – Allein dieses Beispiel verdeutlicht, warum es bei Seenotfällen mitunter zu falschen Positionsangaben kommen konnte, mit Standortabweichungen von 10, 20 und mehr Seemeilen. – Interessant ist hierzu der Spiegel-Artikel 1958 über den Untergang des Segelschulschiffs Pamir, der sich u. a. auch mit der fehlerhaften Positionsangabe beschäftigt.[3]
Berechnung der Standlinie[Bearbeiten | Quelltext bearbeiten]


Zur Berechnung der im Kapitel „Prinzip der seemännischen Praxis“ beschriebenen Standlinie betrachte man das durch den Nordpol, das Gestirn (hier die Sonne) und den Zenit des Standortes am Himmelszelt aufgespannte sphärische Dreieck. In diesem Dreieck sind
- die Seite , wobei die momentane Deklination des beobachteten Gestirns ist
- die Seite , wobei die geographische Breite des Beobachters ist
- die Seite , wobei die Zenitdistanz des Gestirns und die Höhe des Gestirns über dem Horizont sind.








ist der Greenwich-Stundenwinkel des beobachteten Gestirns.
ist der Winkel zwischen den Meridianen des Beobachters und des Gestirns.
ist die geographische Länge des Beobachters, wobei östliche Längen positiv und westliche Längen negativ angegeben werden.



Das beschriebene Dreieck kann unter anderem mit dem Seiten-Kosinussatz der sphärischen Trigonometrie berechnet werden. Dieser Kosinussatz lautet:

Ersetzt man , und wie oben beschrieben, so folgt für :



Die geographische Länge ist:

also:
![{\displaystyle \lambda =\pm \arccos \left[{\frac {\sin h-\sin \delta \cdot \sin \varphi }{\cos \delta \cdot \cos \varphi }}\right]-Grt}](https://wikimedia.org/api/rest_v1/media/math/render/svg/4e344f1d23e4714633a02b46209075631d345c18)
Der Beobachter bestimmt mit dem Sextanten zu einem bestimmten Zeitpunkt die Höhe des Gestirns. Der Greenwich Stundenwinkel und die Deklination des Gestirns werden für diesen Zeitpunkt der Nautischen Tafel[4] entnommen. Für jede mögliche Breite des Beobachters, kann die dazugehörende Länge mit obiger Formel berechnet werden. Das Ergebnis ist eine geschlossene Standlinie auf der Erdoberfläche. Von jedem Punkt dieser Standlinie (in der Grafik blau eingezeichnet), wird das Gestirn zu einem bestimmten Zeitpunkt in gleicher Höhe gesehen.
Berechnet man aus zwei Breiten und die dazugehörenden Längen und , und verbindet man die beiden Punkte auf der Karte, so entsteht die Standlinie, auf der sich der Beobachter befinden muss.




Beispiel[Bearbeiten | Quelltext bearbeiten]

Ein Beobachter, der sich in der Sahara irgendwo auf einer geographischen Breite zwischen 24° und 26° Nord befindet, misst am Dienstag, 13. April 2021 um 14:00 Uhr UTC die Höhe der Sonne über dem Horizont. Die gemessene und beschickte Höhe der Sonne ist . Gemäß dem Nautischen Almanach[4] hat die Sonne zu diesem Zeitpunkt eine Deklination und einen Greenwich-Stundenwinkel . Für die zwei Breitengrade und berechnen sich die zwei dazugehörenden Längen als und . Der Beobachter muss sich auf der 235 km langen Verbindungslinie zwischen den zwei Standorten und im Tassili n’Ajjer befinden. Berechnet man mit einem zweiten Gestirn oder wieder mit der Sonne zu einem anderen Zeitpunkt eine zweite Standlinie, so werden sich diese am Standort des Beobachters kreuzen.









Berechnet man die Längen nicht nur für die zwei gewählten Breiten und , sondern für alle möglichen Breiten, so entsteht die in der oberen Grafik blau eingezeichnete Standlinie auf der Erdoberfläche, von der aus alle Beobachter die Sonne zum angegebenen Zeitpunkt auf einer Höhe von sehen. Wie die (blaue) Standlinie zeigt, gibt es im Atlantik östlich der Bahamas noch einen zweiten Standort zwischen 24° und 26° Nord an dem die Sonne auf gleicher Höhe beobachtet wird. Zur Berechnung der Länge dieses Standortes wird obige Formel mit dem Minuszeichen vor dem angewandt.


Berechnung der Standlinie bei ungefähr bekanntem Ort[Bearbeiten | Quelltext bearbeiten]
Ein zweiter Weg, die Standlinie, bei ungefähr bekanntem Standort zu bestimmen, basiert auf der Messung der Höhe eines Gestirns und der gerechneten Höhe des Gestirns am geschätzten Ort. Die Seemeile ist die Distanz auf der Erdoberfläche, die im Zentrum der Erde, bzw. im Zentrum der Himmelskugel einen Winkel von einer Bogenminute () aufspannt. Wenn die gemessene Höhe des Gestirns um Bogenminuten kleiner als die für den geschätzten Standort und für einen bestimmten Zeitpunkt berechnete Höhe ist, so befindet sich der Beobachter wegen der Erdkrümmung auf einer Linie, die sich vom Gestirn aus gesehen um Seemeilen hinter dem geschätzten Ort befindet. Die Höhe des Gestirns für den geschätzten Standort (🐪) berechnet sich (wie oben) mit dem sphärischen Seitenkosinussatz



wobei wieder gilt: , und


Der Winkel ist die Summe der geographischen Länge des vermuteten Ortes und des momentanen Greenwich-Stundenwinkels des Gestirns.

Den momentanen Greenwich-Stundenwinkel entnimmt man dem astronomischen Almanach[4].
Ersetzt man im Seitenkosinussatz und wie beschrieben, so folgt:


Die berechnete Höhe ist also:

Das Azimut des Gestirns lässt sich für den geschätzten Ort und die gegebene Zeit aus dem folgenden Seitenkosinussatz berechnen:

Ersetzt man in letzter Formel wie oben gegeben die Werte und löst nach auf, so folgt:


![{\displaystyle \alpha =\pm \arccos \left[{\frac {\sin \delta -\sin h\cdot \sin \varphi }{\cos h\cdot \cos \varphi }}\right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/41a24da783d530cac19966aef3dfd2426248933b)
Jetzt sind für einen bestimmten Zeitpunkt und für einen bestimmten geschätzten Ort das Azimuth und die Höhe des Gestirns bekannt. Die ArcCos-Funktion liefert positive und negative Winkel im Bereich von 0° bis 180°. Wird der Winkel als positiv angenommen, so ist das nach Osten gerichtete Azimut. Wird der Winkel als negativ angenommen, so ist es ein nach Westen gerichtetes Azimut .

Beispiel[Bearbeiten | Quelltext bearbeiten]

Sie befinden sich in der Nähe der Oase El Golea, wissen aber nicht, ob Sie östlich oder westlich der Oase sind. Das Zentrum der Oase befindet sich bei den Koordinaten und . Es ist Montag, 21. Juni 2021 16:00 UTC Uhr und Sie haben in der Sandwüste eine Messung der Sonnenhöhe durchgeführt: . Gemäß Almanach[4] sind der Greenwich-Stundenwinkel und die Deklination der Sonne zu diesem Zeitpunkt: und . Setzt man , und in der Höhenformel ein, so sieht man, dass die Sonne an diesem Tag zur gegebenen Zeit über dem Horizont El Goleas steht. Setzt man diese Höhe , und in der Formel für das Azimut ein, so findet man, dass das Azimut oder ist. Wir wissen, dass um 16 Uhr UTC die Sonne westlich von El Golea steht und für uns daher das erste Azimut gilt.









Die in der Wüste gemessene Höhe ist 19,5' größer, als die Sonnenhöhe, die wir zu gegebenem Zeitpunkt in El Golea beobachtet hätten. Wir befinden uns also auf einer 19,5 Seemeilen von El Golea entfernten, in Richtung Sonne gelegenen Standlinie. Auf der Karte zeichnet man von El Golea ausgehend eine Linie mit dem Azimut ein und quer dazu in einer Distanz von 19,5 NM = 36,11 km unsere Standlinie. Wir befinden uns westlich von El Golea. Eine zweite Messung mit einem anderen Gestirn oder eine zweite Messung der Sonnenhöhe zu einem anderen Zeitpunkt ergäbe eine zweite Standlinie. Unser Standort ist der Schnittpunkt der beiden Standlinien.

Ergänzende Verfahren[Bearbeiten | Quelltext bearbeiten]
Bestimmung des Breitengrads[Bearbeiten | Quelltext bearbeiten]

Die geografische Breite lässt sich auch direkt durch Messung des Höchststandes der Sonne (sogenanntes Mittagsbesteck) oder eines markanten Fixsterns (Obere Kulmination) bestimmen. Bis zur Erfindung des Sextanten erfolgte dies mit dem Jakobsstab. Bei ruhiger See und deutlich erkennbarem Horizont ist mit modernen Sextanten eine Genauigkeit von ca. einer Bogenminute (1/60 Grad) erreichbar, was in Position einer Seemeile (1852 m) entspricht. Diese Form der Astronavigation wird auch Breitensegeln und das Ergebnis die Mittagsbreite genannt.
Der Polarstern nimmt unter den Gestirnen eine Sonderrolle ein, da er nördlich des Erdäquators durch seine Lage nahe am Himmelspol während der ganzen Nacht sichtbar, leicht identifizierbar und ausreichend hell ist. Aus dem gemessenen Höhenwinkel des Polarsterns ergibt sich der Breitengrad nach nur wenigen rechnerischen Korrekturen (maximal 0,9°) unmittelbar.
Beobachtet man die Obere Kulmination eines Gestirns, spricht man von einer Meridianbreite. Auch sie ist einfach auszuwerten (vereinfachte Sterneck-Methode) und wenn die Südrichtung nicht genau bekannt ist, können die Messungen auch zirkummeridian erfolgen.
Bestimmung des Längengrads[Bearbeiten | Quelltext bearbeiten]
Die Bestimmung der geografischen Länge ist nur mit Hilfe einer genauen Zeitmessung möglich und ist in die Geschichte der Seefahrt als das Längenproblem eingegangen. Die Orientierung des Sternhimmels hängt ab vom Tag, der Weltzeit und dem Längengrad. Sind Datum und Uhrzeit (UTC) bekannt, erhält man die Länge aus der Sternposition.
Beispiel 1: Am Ausgangspunkt ist um 2:00 Uhr Sonnenzeit der zirkumpolare Große Wagen so wie im Bild orientiert. An anderen Längengrad-Positionen erscheint er entsprechend dem Längenwinkel gedreht: Bei einer um 30° östlicheren Position steht er an der Position 4, bei 30° westlich an Position 0.
Beispiel 2: Entlang eines Breitengrads wird dieselbe Position des Großen Wagens zu anderen Zeiten erreicht. Ein Unterschied von einem Längengrad verursacht eine Zeitverschiebung von 24h/360°, also 4 Minuten. Erreicht beispielsweise der Große Wagen die Position erst um 3:00 Uhr, befindet man sich 15° westlicher vom Ausgangspunkt.
Beobachtet man den Kulminationszeitpunkt der Sonne aus ihrem Höhenwinkel, so kann man aus dem nautischen Almanach die Länge des eigenen Standorts ermitteln. Wegen der um die Mittagszeit fast horizontalen Sonnenbahn ist die Kulmination nur durch Mittelung zweier Zeiten gleicher Sonnenhöhe vor und nach der Kulmination genau genug bestimmbar. Hat sich der Beobachter zwischen diesen zwei Zeitpunkten bewegt, so sind insbesondere für Nord-Süd Ortswechsel Korrekturen für die zweite Sonnenhöhe erforderlich (siehe Versegelung).
Viermal im Jahr (16. April, 14. Juni, 1. September und 25. Dezember) ist die Zeitgleichung Null. Rund um diese Tage kann die Länge ohne zusätzliche Tabellen – nur aus dem Höchststand der Sonne und der Weltzeit UTC – bestimmen.
Das Längenproblem konnte man vor Erfindung des Schiffschronometers nur näherungsweise mit Tobias Mayers Methode der Monddistanzen lösen, allerdings bestenfalls auf Zehntelgrad genau. Denn
- die Mondbahn unterliegt zahlreichen schwer berechenbaren Störungen,
- und bewegt sich nur jede Stunde um seinen Durchmesser weiter;
- die Haltung des Messgeräts, mit dem der Winkel zwischen Mond und Stern gemessen wird, ist schwierig, da zwei annähernd punktförmige Objekte gleichzeitig und z. T. unter großen Winkeln zu erfassen sind.
Allerdings schreibt Georg Forster über seine Weltreise mit James Cook 1774 bei der Osterinsel, dass trotz der neuen Chronometer (nach John Harrison) die Methode der Längenbestimmung mittels Monddistanzen die genaueste sei. Inzwischen gibt es neue Tafeln von Bruce Stark zu Monddistanzen (s. u.), mit denen sich Zeit und Ort auf See bestimmen lassen.
Weitere Entwicklung und moderne Positionsbestimmung[Bearbeiten | Quelltext bearbeiten]
Erst gegen Ende des 19. Jahrhunderts waren hochpräzise, robuste Uhren so billig geworden, dass sich jeder Kapitän eine solche leisten konnte, und das Prinzip der Zeitmessung setzte sich endgültig gegen Mayers Methode der Monddistanzen durch. Da sich die Erde am Äquator mit ca. 463 m/s bewegt, verursacht ein Uhrenfehler von 1 s einen Positionsfehler von bis zu 463 m. Mit Einführung des Kurzwellenfunks konnten sekundengenaue Zeitinformationen (Zeitzeichen) auf hoher See mit einfachen Radiogeräten empfangen werden, wodurch sich die Positionsbestimmung weiter verbesserte. Heute verwendet der Navigator zur Positionsbestimmung das Höhendifferenzverfahren nach Marcq Saint-Hilaire: Dabei wird die Höhe eines Gestirns über dem Horizont für den Koppelort zum Messzeitpunkt berechnet.
Die Höhengleiche (die Linie auf der Erdoberfläche, von der aus alle Beobachter für ein bestimmtes Gestirn denselben Höhenwinkel messen) ist ein Kreis auf der Erdoberfläche. Alle Beobachter auf dieser Linie sind gleich weit vom Bildpunkt entfernt, dem Ort, an dem die Verbindungslinie zwischen Gestirn und Erdmittelpunkt die Erdoberfläche durchstößt. Aufgrund des großen Radius dieser Kreise kann die Höhengleiche in der Praxis als Gerade angenommen werden, wenn der Höhenwinkel des Gestirns über dem Horizont kleiner als 85° ist. Daraus ergibt sich eine Standlinie. Schneidet man Standlinien mehrerer Gestirne, erhält man einen wahren Ort. Wenn man z. B. am Tag nur die Sonne als einziges Gestirn zur Verfügung hat, „versegelt“ man die Standlinie, verschiebt sie also entlang des Kurses um die zurückgelegte Distanz, bis man eine andere Standlinie erhält, mit der diese zum Schnitt gebracht werden kann. Dieses „Versegeln“ kann man auf alle Arten von Standlinien anwenden (siehe hierzu Navigation).
Heutzutage verwenden Schiffe zur Navigation Navigationssatellitensysteme, doch sind Mittel für die Positionsbestimmung mit astronomischen Methoden (also Tabellen und Geräte) weiterhin vorgeschrieben. Nach einer etwa zehnjährigen Pause unterrichtet die US-Navy seit 2011 wieder Navigatoren, und seit Herbst 2015 alle Offiziere, in Astronomischer Navigation.[5]
Siehe auch[Bearbeiten | Quelltext bearbeiten]
- Navigationsstern
- Längenuhr, Astrolabium, Sextant
- GPS, GLONASS, Galileo
- Koppelnavigation, Peilung nach Polarstern
- interplanetare Navigation
- Space Sextant, Raumlage
- Astronomisch-inertiale Navigation
Literatur[Bearbeiten | Quelltext bearbeiten]
- Dava Sobel: Längengrad. btb Taschenbuch, 1998. ISBN 3-442-72318-3. (Engl. Orig.: Longitude, 1995)
- Frank Mestemacher: Astronomische Navigation. Nicht nur zum Ankommen. Kruse, Stralsund 2013, ISBN 978-3-941444-87-4
- Wolf Nebe: Praxis der Astronavigation. Erklärung der Grundlagen anhand farbiger Grafiken; schnelle Standortbestimmung durch klar strukturierte Anweisungen. Delius Klasing, Bielefeld 1997, ISBN 3-7688-0984-6
- Bobby Schenk: Astronavigation. Delius Klasing, Bielefeld 2000, ISBN 3-7688-0259-0
- Gerhard Meyer-Uhl: Praktische Astronavigation mit Weltumseglern. (= BLV-Bordpraxis, Nr. 7) BLV-Verlagsgesellschaft, München / Wien / Zürich 1980. ISBN 3-405-12219-8
- Karl-Richard Albrand: Astronomische Navigation heute. (= Up to date, Weiterbildung an Bord, Nr. 24) Herausgegeben vom Sozialwerk für Seeleute e. V., Hamburg. Neue überarbeitete Auflage, Stand 1991. Hamburg: Sfs, 1991
- Mary Blewitt: Praktisches Navigieren nach Gestirnen. Delius Klasing, Bielefeld 1992, ISBN 978-3-87412-033-3
- Walter Stein; Werner Kumm: Astronomische Navigation. (Yacht-Bücherei, Band 88) 11. Auflage. Delius Klasing, Bielefeld 2002, ISBN 3-87412-138-0
- Werner F. Schmidt: Astronomische Navigation. Ein Lehr- und Handbuch für Studenten und Praktiker. 2. Auflage. Springer, Berlin / Heidelberg / New York / Barcelona / Budapest / Hong Kong / London / Mailand / Paris / Santa Clara / Singapur / Tokyo 1996, ISBN 3-540-60337-9
- Winfried Böhm: Handbuch der Navigation – Begriffe, Formeln, Verfahren, Schemata. Bussesche Verlagshandlung, Herford 1978, ISBN 3-87120-323-8
- Joachim Böhme, Walter Steinfatt, Lothar Uhlig: Astronomische Navigation. (= Leitfaden der Navigation). 4. Auflage. Transpress Verlag für Verkehrswesen, Berlin 1987, ISBN 3-344-00000-4
- C. S. Draper: Space navigation – guidance and control. Mackay, London 1966
- Edward V. Stearns: Navigation and guidance in space. Prentice-Hall, Englewood Cliffs NJ 1963
- Hasso Eichel: Ortsbestimmung nach Gestirnen. Franckh’sche Verlagshandlung, Stuttgart 1962
- Robert A. Park, Thomas Magness: Interplanetary navigation – principles and methods for journeys to other planets. Holt, Rinehart and Winston, New York 1964
- Erwin Schrödinger; P. Jordan; H. Siedentopf: Orientierung im Weltall. (= Das internationale Forum, Heft 3). Fontana-Verlag, Zürich 1954
- Markus Werthmann: Astronavigation. Dipl.-Arb., Uni.Innsbruck, 2008
- Sergejs Slaucitajs: Über die astronomische Navigation in hohen Breiten = On astronomical navigation in high latitudes. (= Contributions of Baltic University, Nor.14) Baltic University, Pinneberg 1947. 16 Seiten Umfang
- Stark, Bruce: Stark Tables for Clearing the Lunar Distance and finding Universal Time by Sextant Observation (3. edition 2010), www.starpath.com/publications, ISBN 978-0-914025-21-4.
Weblinks[Bearbeiten | Quelltext bearbeiten]
- Schrittweise Anleitung zur Astronavigation
- Astronomische Navigation inkl. Monddistanzen
- Astronavigation beim Segeln
- Ephemeriden und Sternenpositionen
Einzelnachweise[Bearbeiten | Quelltext bearbeiten]
- ↑ siehe in der englischen Wikipedia
- ↑ Maritime Safety Information. In: msi.nga.mil, abgerufen am 15. November 2012
- ↑ Pamir-Untergang, Drei Fragen. In: Der Spiegel. Nr. 30, 1958 (online).
- ↑ a b c d Zum Beispiel: The Nautical Almanac 2021 ( vom 22. Januar 2021 im Internet Archive) abgerufen am 15. Mai 2023
- ↑ Tim Prudente: Seeing stars, again: Naval Academy reinstates celestial navigation. ( vom 20. Februar 2016 im Internet Archive) In: Capital Gazette, 12. Oktober 2015; abgerufen am 15. Mai 2023