Gerade

Eine gerade Linie oder kurz Gerade ist ein Element der Geometrie. Sie ist eine gerade, unendlich lange, unendlich dünne und in beide Richtungen unbegrenzte Linie. Die kürzeste Verbindung zweier Punkte wird hingegen als Strecke bezeichnet. Moderne axiomatische Theorien der Geometrie nehmen darauf jedoch keinen Bezug (Synthetische Geometrie). Für sie ist eine Gerade ein Objekt ohne innere Eigenschaften, lediglich die Beziehungen zu anderen Geraden, Punkten und Ebenen sind von Bedeutung. In der analytischen Geometrie wird eine Gerade als eine Menge von Punkten realisiert. Genauer: In einem affinen Raum ist eine Gerade ein eindimensionaler affiner Unterraum.
Während Otto Hesse in seinem Buch Analytische Geometrie der geraden Linie, ... (1873) ausschließlich gerade Linie verwendet, sind in dem Buch Vorlesungen über Höhere Geometrie (1926) von Felix Klein die beiden Bezeichnungen gerade Linie und Gerade zu finden. In der neueren Literatur (z. B. dtv-Atlas zur Mathematik) ist ausschließlich Gerade üblich.
Synthetische Geometrie[Bearbeiten | Quelltext bearbeiten]
In seinen Elementen hat Euklid eine explizite Definition einer Geraden gegeben, die dem anschaulichen Bild entspricht. Für Sätze und ihre Beweise spielt diese Definition jedoch keine Rolle. Moderne Axiomensysteme verzichten daher auf eine solche Definition.
Eine Gerade ist in diesem Fall ein Begriff, auf den die einzelnen Axiome Bezug nehmen. Ein Beispiel ist das erste Axiom aus Hilberts Axiomensystem:
- Zwei voneinander verschiedene Punkte und bestimmen stets eine Gerade .



Die Bedeutung des Begriffs Gerade ergibt sich aus der Gesamtheit der Axiome. Eine Interpretation als eine unendlich lange, unendlich dünne Linie ist nicht zwingend, sondern nur eine Anregung, was man sich anschaulich darunter vorstellen könnte.
In der projektiven Ebene sind die Begriffe Punkt und Gerade sogar vollständig austauschbar (Dualität). Damit ist es hier möglich, sich eine Gerade als unendlich klein und einen Punkt als unendlich lang und unendlich dünn vorzustellen.
Analytische Geometrie[Bearbeiten | Quelltext bearbeiten]
.png)
In der analytischen Geometrie wird der geometrische Raum als -dimensionaler Vektorraum über den reellen Zahlen dargestellt. Eine Gerade wird dabei als eindimensionaler affiner Unterraum dieses Vektorraums definiert, d. h. als Nebenklasse eines eindimensionalen linearen Unterraumes.

In drei Dimensionen erfüllt der Geradenbegriff der analytischen Geometrie alle Bedingungen, die Hilbert in seinem Axiomensystem der Geometrie voraussetzt. In diesem Fall ist eine Gerade somit auch eine Gerade im Sinne Hilberts.
Man benötigt lediglich die Lage zweier Punkte, um eine Gerade zu beschreiben. Einer der Punkte dient dabei als „Stütze“ der Geraden, auf ihm „liegt“ sie sozusagen auf – dieser Punkt heißt daher Aufpunkt oder Stützpunkt der Geraden. Mit dem zweiten Punkt erhält man die Richtung der Geraden. Die Richtung wird dabei durch den Vektor vom Aufpunkt zum „Richtungspunkt“ angegeben.
Die Gerade durch die Punkte und enthält genau die Punkte , deren Ortsvektor eine Darstellung


- mit


besitzt, also

Hierbei ist der Stützvektor, das heißt der Ortsvektor des Stützpunkts und der Richtungsvektor.


Die affine Hülle von zwei verschiedenen Vektoren und



ist ebenfalls eine Gerade.
Auch der Lösungsraum eines (inhomogenen) linearen Gleichungssystems mit linear unabhängigen Gleichungen ist ein affiner Unterraum der Dimension Eins und somit eine Gerade. In zwei Dimensionen kann eine Gerade folglich durch eine Geradengleichung


angegeben werden, wobei und oder ungleich Null sein muss. Ist ungleich 0, so spricht man von einer linearen Funktion .




Kürzester Weg[Bearbeiten | Quelltext bearbeiten]
Im reellen euklidischen Raum liegt der kürzeste Weg zwischen zwei Punkten auf einer Geraden. Verallgemeinert man diese Eigenschaft der Geraden auf gekrümmten Räumen (Mannigfaltigkeiten), so gelangt man zum Begriff der geodätischen Linie, kurz Geodäte.
Gleichung einer Geraden in der Ebene[Bearbeiten | Quelltext bearbeiten]
Die Gleichung einer Geraden in der Ebene kann man auf drei verschiedenen Weisen bestimmen:
Punkt-Richtung-Gleichung:
- Gegeben sind ein Punkt und der Neigungswinkel (Anstiegswinkel) .
- Gegeben sind ein Punkt und die Steigung (der Anstieg) .




Zwei-Punkte-Gleichung:
- Gegeben sind zwei Punkte und mit .




oder

Gleichung einer Geraden im Raum ℝⁿ[Bearbeiten | Quelltext bearbeiten]
Punkt-Richtungs-Gleichung[Bearbeiten | Quelltext bearbeiten]
Für jedes Paar aus einem Ortsvektor (d. h. Punkt) und einem Richtungsvektor existiert eine Gerade , die enthält und in Richtung verläuft, nämlich





- .

Zwei-Punkte-Gleichung[Bearbeiten | Quelltext bearbeiten]
Gegeben seien zwei Ortsvektoren (d. h. Punkte) mit . Dann existiert eine eindeutig bestimmte Gerade , die und enthält, nämlich




- .

Lage zweier Geraden zueinander[Bearbeiten | Quelltext bearbeiten]
- Lagebeziehungen zweier Geraden (rot und dunkelblau) im Raum
-
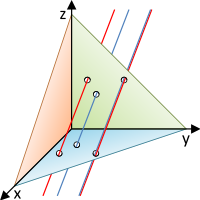 echt parallel (links) und gleich (rechts)
echt parallel (links) und gleich (rechts) -
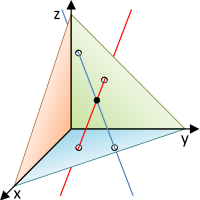 schneidend (im schwarzen Punkt)
schneidend (im schwarzen Punkt) -
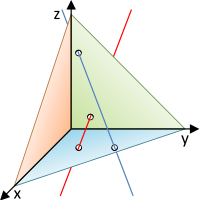 windschief
windschief



Zwei Geraden können folgende Lagebeziehungen zueinander haben. Sie können:
- Gleich sein: Beide Geraden haben alle Punkte gemeinsam.
- Einen Schnittpunkt besitzen: Beide Geraden haben genau einen Punkt gemeinsam (speziell: senkrecht zueinander).
- Zueinander echt parallel sein: Beide Geraden haben keinen Punkt gemeinsam und lassen sich durch eine Verschiebung ineinander überführen.
- Zueinander windschief sein: Beide Geraden haben keinen Punkt gemeinsam, aber lassen sich nicht durch eine Verschiebung allein ineinander überführen (ab mindestens drei Dimensionen).
Im Sinne der Theorie der Relationen spricht man auch von Parallelität, wenn beide Geraden identisch sind, insbesondere ist jede Gerade zu sich selbst parallel. Zur Präzisierung unterscheidet man dann zwischen echt parallel und identisch.
Schnittpunkt in der Ebene[Bearbeiten | Quelltext bearbeiten]
Schnittpunkt zweier Geraden[Bearbeiten | Quelltext bearbeiten]
Für den Schnittpunkt zweier nicht paralleler
- Geraden (gegeben in Koordinatenform)

ergibt sich mit der Cramerschen Regel für die Koordinaten des Schnittpunktes


Falls ist, sind die beiden Geraden parallel.

- Für eine Gerade durch die Punkte
- und
- und eine Gerade durch die Punkte
- und
- Berechnet man den Schnittpunkt, indem man zuvor die Zweipunkteformen in Koordinatenformen umrechnet.
- Der Schnittpunkt ergibt sich zu
- und
- .







Schnittpunkt zweier Strecken[Bearbeiten | Quelltext bearbeiten]

Sind zwei nicht parallele Strecken und gegeben, so müssen sie sich nicht schneiden. Denn der Schnittpunkt der zugehörigen Geraden muss nicht in beiden Strecken enthalten sein. Um letzteres zu klären, stellt man beide Strecken parametrisiert dar:



- ,


Schneiden sich die Strecken, so muss der gemeinsame Punkt der zugehörigen Geraden Parameter haben mit der Eigenschaft . Die Schnittparameter sind Lösung des linearen Gleichungssystems




Dieses löst man (wie oben) mit der Cramerschen Regel, überprüft die Schnittbedingung und setzt oder in die zugehörige Parameterdarstellung ein, um schließlich den Schnittpunkt zu erhalten.



Beispiel: Für die Strecken und erhält man das Gleichungssystem




und . D. h. die Strecken schneiden sich und der Schnittpunkt ist .


Bemerkung: Betrachtet man Geraden durch zwei Punktepaare, so kann man die Bedingung ignorieren und erhält mit dieser Methode den Schnittpunkt der beiden Geraden.
Winkel in der Ebene[Bearbeiten | Quelltext bearbeiten]
Neigungswinkel einer Gerade[Bearbeiten | Quelltext bearbeiten]
Ist eine Gerade in der Ebene mit in Koordinatenform gegeben, dann gilt für den Neigungswinkel dieser Geraden:


Das folgt aus der Definition des Tangens. Anwenden der Umkehrfunktion des Tangens (Arkustangens) auf beiden Seiten der Gleichung ergibt

Für den Spezialfall verläuft die Gerade senkrecht und diese Gleichungen sind nicht definiert. Die Funktion (Tangens) hat Polstellen bei und .[1]




Schnittwinkel zwischen zwei Geraden[Bearbeiten | Quelltext bearbeiten]
Sind die zwei sich schneidenden Geraden und mit den Ortsvektoren und und den linear unabhängigen Richtungsvektoren und gegeben, dann ist der Schnittwinkel zwischen diesen Geraden der Winkel zwischen den Richtungsvektoren:








Die Geraden sind orthogonal zueinander, wenn der Schnittwinkel ein rechter Winkel ist, also . Das ist genau dann der Fall, wenn das Skalarprodukt der Richtungsvektoren gleich 0 ist, also .[2]


Sind zwei Geraden in der Ebene mit und in Koordinatenform gegeben, dann ist der Schnittwinkel die Differenz der Neigungswinkel und der Geraden:





Anwenden des Additionstheorems für den Tangens ergibt

Wegen und folgt daraus



Insgesamt ergibt sich

Anwenden der Umkehrfunktion des Tangens (Arkustangens) auf beiden Seiten der Gleichung ergibt

Die Geraden sind genau dann orthogonal zueinander, wenn der Nenner gleich 0 ist, also . Für diese Spezialfälle, nämlich für und , sind die genannten Gleichungen nicht definiert. Die Funktion (Tangens) hat Polstellen bei und .[3]



Abstand in der Ebene[Bearbeiten | Quelltext bearbeiten]
Abstand zwischen Punkt und Gerade[Bearbeiten | Quelltext bearbeiten]
Der Abstand zwischen dem Punkt und der Geraden mit der Koordinatenform beträgt:


Der Punkt auf der Geraden, der am nächsten liegt, hat die Koordinaten

Wenn die Gerade durch die Punkte und verläuft, ist





Diese Werte können in die Formeln eingesetzt werden.[4]
Abstand im dreidimensionalen Raum[Bearbeiten | Quelltext bearbeiten]
Abstand zwischen Punkt und Gerade[Bearbeiten | Quelltext bearbeiten]
Der Abstand zwischen dem Punkt und der Geraden, die durch die Punkte und verläuft, beträgt:[5]




Abstand zwischen zwei Geraden[Bearbeiten | Quelltext bearbeiten]
Zwei Geraden, wobei die eine durch die Punkte und und die andere durch die Punkte und verläuft, haben folgenden Abstand:[6]



Die Gerade in Technik und Vermessungskunde[Bearbeiten | Quelltext bearbeiten]
In technischen Fachgebieten ist die Gerade das wichtigste Element für Konstruktionen, zur Trassierung, zur Ortsbestimmung und zur Einmessung von Koordinaten:
- in Form zweier Schenkel bei der Winkelmessung,
- zur Messung von Richtungen (genordet oder relativ)
- für die Entfernungsmessung
- für Alignements und zur Absteckung von Linien.
Bei Messungen wird sie durch die Zielachse eines Messfernrohrs oder einen Laser repräsentiert, im Bauwesen etwa durch ein Schnurgerüst.
Siehe auch[Bearbeiten | Quelltext bearbeiten]
Weblinks[Bearbeiten | Quelltext bearbeiten]
- Eric W. Weisstein: Line. In: MathWorld (englisch).
Einzelnachweise[Bearbeiten | Quelltext bearbeiten]
- ↑ Math Open Reference: Inverse tangent function (arctan)
- ↑ W3spoint.com: Angle between two lines
- ↑ emathzone.com: Angle of Intersection of Two Lines
- ↑ Wolfram MathWorld: Point-Line Distance--2-Dimensional
- ↑ Wolfram MathWorld: Point-Line Distance--3-Dimensional
- ↑ Wolfram MathWorld: Line-Line Distance