U-Boot von Guido da Vigevano (14. Jahrhundert)U-Boot von Roberto Valturio (1472)
Der Wunsch des Menschen, länger und tiefer zu tauchen, als es seine Lungenkapazität zulässt, ist etwa ebenso alt wie der Wunsch zu fliegen. Deswegen beschäftigten sich schon immer Menschen damit, entsprechende Vorrichtungen oder Instrumente zu entwickeln, die dies ermöglichen sollten. Aus der Antike liegen diesbezüglich Berichte von Aristoteles und Plinius dem Älteren vor. Selbst Alexander der Große soll bereits Tauchversuche im Mittelmeer unternommen haben (siehe Tauchglocke). Detailliertere Beschreibungen eines „Colymphas“ (griechisch für „Taucher“) genannten und für militärische Zwecke geeigneten Unterseebootes stammen aus dem 7./8. Jahrhundert von Pseudo-Hieronymus in seiner Aethicus zugeschriebenen Kosmographie, einer Mischung aus Fakten, Mythen, technischen und geographischen Ausführungen sowie christlichen Weisheiten.
Eine jüngere Beschreibung eines Tauchfahrzeugs in einer Erzählung befindet sich im etwa 1180/90 entstandenen Heldenepos „Salman und Morolf“.[2]
Eine frühe technische Zeichnung eines U-Bootes stammt von Guido da Vigevano, der Ende des 13. Jahrhunderts geboren wurde, sodass diese aus dem frühen 14. Jahrhundert stammen dürfte.
Die Geschichte des technisch geprägten Tauchens bzw. der Entwicklung eines Tauchboots begann mit dem 15. Jahrhundert. So entwarf beispielsweise 1405 der Nürnberger Kriegsbaumeister Konrad Kyeser in seinem Werk Bellifortis einen ersten Tauchanzug. Roberto Valturio zeichnete 1472 sein U-Boot und Leonardo da Vinci zeichnete 1515 ein Ein-Mann-Tauchboot.
Diese Ideen wurden weiter vorangetrieben. Der spanische Ingenieur Jerónimo de Ayanz entwickelte nebst anderen Tauchgeräten zu Beginn des 17. Jahrhunderts auch ein Unterwasserboot. Sein hermetisch abgedichtetes Boot verfügte über Antriebsruder sowie über eine Höhen-/Tiefensteuerung. Die Luft wurde über Schläuche mit flexiblen Dichtungen von außen mittels eines großen Blasebalg zugeführt und durch Ventile reguliert. 1602 wurde das Unterseeboot von königlichen Experten geprüft und für funktionstüchtig befunden. Ayanz ließ seine Erfindung, die er mit Text und Skizzen exakt beschrieb, 1606 patentieren.[3]Philipp III. verlieh ihm das Privileg zu deren kommerziellen Nutzung. Nachdem Ayanz seine Rechte in zwei Prozessen gegen Nachahmer durchgesetzt hatte, gelang es ihm nicht mehr, Gewinn aus seiner Erfindung zu ziehen. Nach seinem Tod geriet sie in Vergessenheit.[4]
1604 beschrieb der deutsche Mathematiker Magnus Pegel in einem Buch die Grundgedanken und Voraussetzungen für den Bau eines Tauchbootes. Der niederländische Erfinder Cornelis Jacobszoon Drebbel ging über die bloße Theorie hinaus und baute im Jahre 1620 ein manövrierbares Unterwasserfahrzeug – ein mit Leder überzogenes Holzruderboot.
Das Rotterdammer Schiff war dann das erste für den militärischen Einsatz konzipierte Tauchboot der Geschichte. Es wurde im Jahre 1653 vom Franzosen De Son im südholländischen Rotterdam konstruiert.
Im Auftrag des Landgrafen Karl von Hessen-Kassel konstruierte 1691 der französische Physiker Denis Papin, der auch Professor an der Philipps-Universität Marburg war, ein Tauchboot, dessen erstes Exemplar jedoch 1692 in der Fulda in Anwesenheit einer großen Schar von Schaulustigen[5] zerstört wurde. Der Zweitversuch wies mit einer brennenden Kerze, die brennend wieder auftauchte, vermeintlich nach, dass genügend Atemluft für Menschen im Boot vorhanden sei. Trotz der Fehlschläge hatte die Idee, ein funktionstüchtiges Unterwasserfahrzeug zu bauen, inzwischen weltweit Tüftler motiviert. 1772 wurde im Steinhuder Meer das erste Unterwasserfahrzeug in Deutschland getestet. Es bestand aus Holz und hatte die Form eines Fisches, weshalb es den Namen Hecht erhielt. Mit dem Boot wurde etwa zwölf Minuten getaucht. Der US-Amerikaner David Bushnell baute 1776 die Turtle („Schildkröte“), eine Konstruktion aus Eisen und Eichenholz. Sie gilt als erstes richtiges U-Boot, da als Antrieb zwei über Handkurbeln betriebene Schrauben dienten – im Gegensatz zu ihren beiden Vorläufern, die von Segeln oder mit Rudern an der Wasseroberfläche angetrieben wurden. 1799 beschrieb der Bergmeister Joseph von Baader eine Konstruktion für ein Zwei-Mann-U-Boot.
Die Erfindung von Akkumulator und Elektromotor ermöglichte einen Unterwasserantrieb, der von Muskelkraft unabhängig ist. Auch die industrielle Produktion von Stahl leistete einen wichtigen Beitrag zum Fortschritt des U-Boot-Baus, indem sie einen enorm haltbaren Baustoff an Stelle des leichten und gegenüber Verfall und Parasiten anfälligen Holzes setzte. Darüber hinaus stand mit der Erfindung des Torpedos durch Giovanni Luppis im Jahre 1860 auch eine brauchbare Waffe für den Einsatz von U-Booten aus zur Verfügung.
Insgesamt ermöglichte somit der technische Fortschritt der Industrialisierung den Wandel des U-Bootes zu einem auch für die Marinen kleiner Staaten interessanten und brauchbaren Fahrzeug.
Der US-Amerikaner Robert Fulton entwarf 1801 das U-Boot Nautilus. Es besaß einen Handkurbelantrieb für eine Schraube, neu allerdings waren nun Ruder zur Seiten- und Tiefensteuerung sowie ein Druckluftsystem zur Versorgung der vierköpfigen Besatzung mit Atemluft. Die Nautilus erregte sogar die Aufmerksamkeit Napoleons, galt aber letztlich für militärische Einsätze als zu langsam.
Am 18. Dezember 1850 ließ der bayerische Artillerie-Unteroffizier Wilhelm Bauer in Kiel das erste in Deutschland gebaute U-Boot, den sogenannten Brandtaucher, zu Wasser. Da der Entwurf unter enormem Kostendruck gebaut wurde, war auf den Einbau von Tauchzellen verzichtet worden. Der Tauchvorgang sollte durch das Fluten von Wasser in das Boot erfolgen. Beim ersten Tauchversuch am 1. Februar 1851 in der Kieler Innenförde verschob sich jedoch der Ballast nach achtern, wobei das geflutete Wasser ebenfalls ins Heck floss. Das Boot sackte daraufhin durch, und weiteres Wasser drang durch die Nähte der Außenhaut und das Einstiegsluk. Das Boot sank bis auf den Grund in sieben Metern Wassertiefe. Die dreiköpfige Besatzung, unter ihnen Wilhelm Bauer, wartete, bis der Innendruck so groß war wie der Außendruck, öffnete das Einstiegsluk und trieb an die Oberfläche, wo sie gerettet wurde. Der verunglückte Brandtaucher wurde erst am 6. Juli 1887 geborgen.[6] Nach verschiedenen Museums-Stationen hat das Tauchboot nun seine Heimat im Militärhistorischen Museum der Bundeswehr in Dresden. Ein Modell des Brandtauchers steht im Deutschen Museum in München. Ein Modell vom Bug des Brandtauchers in Originalgröße befindet sich im Kieler Schifffahrtsmuseum.
Illustration der CSS H. L. HunleySchnittzeichnung der Hunley
Während des Sezessionskriegs (USA, 1861–1865) wurden mehrere handgetriebene U-Boote gebaut, unter anderem die CSS H. L. Hunley. Am 17. Februar 1864 versenkte sie die USS Housatonic und gilt somit als erstes U-Boot der Welt, das in Kriegszeiten unter Gefechtsbedingungen ein anderes Schiff zerstört hat. Vorherige U-Boote hatten lediglich zu Testzwecken Schiffe versenkt. Bei diesem Einsatz ging das U-Boot mitsamt seiner achtköpfigen Besatzung allerdings verloren. Erst am 4. Mai 1995 wurde die Hunley von der National Underwater and Marine Agency (NUMA) gefunden und 2000 geborgen.
1863 stellte die französische Marine mit der Plongeur eines der weltweit ersten im getauchten Zustand nicht mit Muskelkraft betriebenen U-Boote in Dienst. Das Boot nutzte eine mit Druckluft betriebene Kolbenmaschine, konnte unter Wasser eine Strecke von bis zu 9 km zurücklegen und war mit einem Spierentorpedo bewaffnet. Der Druckluftantrieb benötigte sehr große Tanks, weshalb das U-Boot mit einer Länge von 43 m und einer Verdrängung von 426 ts wesentlich größer als alle anderen U-Bootkonstruktionen seiner Zeit war. Aufgrund des Antriebskonzeptes und der geringen Reichweite konnte das Boot nicht autark operieren und brauchte ein dampfbetriebenes Überwasser-Begleitschiff, das die Plongeur in das Zielgebiet schleppen und mit der notwendigen Druckluft versorgen musste.
Am 2. Oktober 1864 wurde von Narcís Monturiol mit der Ictíneo II eines der ersten U-Boote mit einem maschinellen Antrieb zu Wasser gelassen. Das Boot bestand aus mit Kupferzargen verstärktem Holz und war komplett mit etwa zwei Millimeter dicken Kupferplatten beschlagen. Es wurde durch einen Magnesiumperoxid, Zink und Kaliumchlorat verarbeitenden Motor angetrieben.
Als erstes funktionsfähiges U-Boot der Welt gilt die Sub Marine Explorer, da es das erste Boot war, das aus eigener Kraft wieder auftauchen konnte. Das Boot wurde 1865 von dem Deutsch-US-Amerikaner Julius Kröhl in New York hergestellt. Die moderne Konstruktion mit ihrem stromlinienförmigen Rumpf hatte ähnlich wie heutige Boote ein System von Ballastkammern für das Tauchen und Presslufttanks für das Auftauchen. Der Einsatzzweck des Bootes war das Sammeln von Perlen vom Meeresgrund, wofür es drei Ausstiegsluken nach unten hatte. Nach erfolgreichen Tests wurde es in Einzelteile zerlegt und nach Panama verschifft, wo Kröhl nach Perlen tauchte. Bereits 1867 verstarb er, genauso wie die gesamte Mannschaft, vermutlich an der Taucherkrankheit. Erst 2006 wurde das Schiff wiederentdeckt. Bis dahin hielten es die Einheimischen für ein zerstörtes japanisches Kleinst-U-Boot aus dem Zweiten Weltkrieg. Es liegt vor der Küste Panamas auf Grund und kann noch heute bei Niedrigwasser zu Fuß erreicht werden. Das Boot ist trotzdem unwiederbringlich verloren, da die starke Korrosion eine Bergung oder Restaurierung unmöglich macht.
Die spanische Isaac Peral von 1888 mit ElektroantriebFranzösisches Boot Narval mit Elektromotor und Dampfmaschine
Gegen Ende des 19. Jahrhunderts begannen sich die Marinen verschiedener Staaten für U-Boote zu interessieren. Die Marineministerien vieler Staaten – vornehmlich Spaniens, Frankreichs und der USA – schrieben Wettbewerbe für U-Boote aus und ließen sich Erfindungen und Entwicklungen vorführen.
1878/79 baute der englische Pfarrer und Erfinder George Garrett (1852–1902) auf eigene Rechnung zwei Tauchboote, die mit Kohlendioxid bzw. Dampf angetrieben wurden. 1885 baute der Schwede Thorsten Nordenfelt zusammen mit Garrett ein mit einer Dampfmaschine angetriebenes U-Boot, das von der griechischen Marine erworben wurde. 1886/87 folgten zwei weitere 30 Meter lange Boote mit einem 250-PS-Dampfantrieb, die Nordenfelt bei der Barrow Shipbuilding Company, einem Vorreiter des U-Boot-Baus, für die osmanische Marine bauen ließ. Die Boote blieben beim Tauchen mit einem halbkugelförmigen Cockpit über Wasser. Der Kessel musste geschlossen werden, unter Wasser erfolgten Antrieb und Navigation mit Druckluft. Die 100 Tonnen schweren Boote waren 30,5 Meter lang und erreichten eine Geschwindigkeit von 6 Knoten über und 4 unter Wasser. Sie waren mit zwei Torpedorohren und zwei Maschinengewehren bewaffnet. Die Abdul Hamid war das erste U-Boot, dem es gelang, ein altes Zielschiff mit einem Torpedo zu versenken. Ein Problem war die Ausbalancierung des Bootes beim Abschuss der Torpedos.
Schon 1881 führte der Franzose Claude Goubet den Elektromotor als Unterwasserantrieb ein. Er setzte dies jedoch erst 1886 mit der Goubet I um. Inzwischen war ihm der Russe Stefan Drzewiecki 1884 mit seiner Drzewiecki Nr. 4 zuvorgekommen. 1888 stellte die spanische Marine ein von einem Marineoffizier namens Isaac Peral entworfenes elektrisch betriebenes U-Boot namens Peral in Dienst, konnte jedoch die primitive Akkumulatortechnik nicht weiterentwickeln.
Ab 1888 wurden in Frankreich U-Boote gebaut und in den Dienst der Marine gestellt. Henri Dupuy de Lôme und Gustave Zédé entwickelten zunächst ein batteriebetriebenes U-Boot namens Gymnote, das in Toulon gebaut wurde. Dort entstanden in der Folgezeit weitere und größere Boote: Die 48,5 m lange Sirène, 1892 gefolgt von einem 36,5 m langen Boot namens Morse. Beide Boote waren ebenfalls batteriebetrieben und mit modernen Whitehead-Torpedos bewaffnet. Den größten Schritt tat das französische Marineministerium mit der von Maxime Laubeuf entwickelten Narval, die 1899 gebaut wurde. Sie hatte einen Dampfantrieb, der bei der Überwasserfahrt die Batterien auflud. Dieses Boot wurde zur Grundlage der Sirène-Klasse, von der ab 1900 vier Exemplare in den Dienst der französischen Marine gestellt wurden. 1904 ersetzte Frankreich mit der Einführung der Aigrette-Klasse den für U-Boote ungeeigneten Dampfantrieb durch den wesentlich wirksameren und zuverlässigeren Dieselmotor.
In den USA verrichtete der emigrierte Ire John Philip Holland Pionierarbeit. Zunächst konstruierte er ab 1879 vier U-Boote für die Fenian United Brotherhood, die mit dieser neuartigen Unterwasserwaffe die Royal Navy bezwingen und Irland zur Unabhängigkeit verhelfen wollte. Hollands Boote wurden bereits bei der Überwasserfahrt von einem Ottomotor angetrieben. 1888 schrieb die US Navy einen Wettbewerb für U-Boot-Konstruktionen aus, den Holland gewann. Wegen finanzieller Probleme konnte die Navy Holland erst ab 1895 Geld zum Bau eines Prototyps übermitteln. So entstand zunächst 1897 die 40 m lange Plunger (auch als Holland V bezeichnet), die jedoch wegen der hochgesteckten Ziele der Navy zahlreiche technische Mängel vor allem in der Antriebstechnik aufwies. Hollands nächste Konstruktion, die mit 25,4 m deutlich kleinere Holland VI, konnte jedoch 1898 die Navy so sehr begeistern, dass ab 1900 die ersten sechs Boote der ähnlich konstruierten Adder-Klasse gebaut wurden. Die anderen Marinen, vor allem die Royal Navy, standen der schnellen Entwicklung von U-Booten allerdings kritisch gegenüber und verweigerten sich zunächst dem U-Boot-Bau. In Russland lief das erste U-Boot, die von Iwan Bubnow entwickelte Delfin (Дельфин), erst 1902 vom Stapel.
Mit dem Einsatz der Hunley 1864 begann auch ein wachsendes Interesse an der Nutzung von U-Booten zu Kriegszwecken. Im deutschen Kaiserreich blieb man zunächst zurückhaltend. Das Versuchs-U-Boot wurde 1897 von Howaldt in Kiel noch auf eigene Rechnung gebaut und als Fehlschlag bereits um 1902 verschrottet.
Im Jahre 1902 wurde in Deutschland ein Prototyp eines 200 Tonnen schweren Experimental-U-Bootes namens Forelle gebaut und intensiv getestet. Das kleine U-Boot stellte sich als durchaus interessant und kriegstauglich heraus und es wurden drei weitere Boote der gleichen Klasse für den Export nach Russland angefertigt. Nun wurde auch in Deutschland über den Einsatz militärischer U-Boote nachgedacht, und schließlich erteilte nach langem Zögern am 4. April 1904 das Reichsmarineamt dem Marineingenieur Gustav Berling den Auftrag, ein U-Boot zur Seekriegsführung zu konstruieren und zu bauen. Berling wandte sich daraufhin an die Germaniawerft in Kiel. Sein Entwurf lehnte sich an die nach Russland exportierten U-Boote an. Da es allerdings einige bedeutsame Änderungen bei der Konstruktion gab, verzögerte sich die Auslieferung des U-Bootes, und erst im April 1905 wurde mit dem Bau begonnen. Die wesentlichen Neuerungen betrafen den Druckkörper, die horizontale Anordnung der Torpedorohre und den Antrieb, da man anstatt eines potenziell gefährlicheren Benzinmotors einen Petroleumantrieb einsetzen wollte, der jedoch noch nicht ausgereift war. Am 14. Dezember 1906 wurde nach mehreren Testfahrten das erste deutsche Militär-U-Boot von der Kaiserlichen Deutschen Marine als U 1 in Dienst gestellt. Heute befindet sich U 1 im Deutschen Museum in München.
Mit Beginn des Ersten Weltkriegs (1914–1918) wurden U-Boote erstmals im größeren Umfang im Handelskrieg (Handels-U-Boot) oder zu militärischen Zwecken (siehe U-Boot-Krieg) eingesetzt. Die U-Boote griffen fast immer aufgetaucht an und versenkten Handelsschiffe meistens mit der Bordkanone. Abtauchen sollte das U-Boot nur, um sich einer Verfolgung zu entziehen, weil es unter der Wasseroberfläche im Ersten Weltkrieg für gegnerische Kriegsschiffe unauffindbar war. Große Tauchtiefen waren deshalb bedeutungslos.
Die Kaiserliche Marine schätzte die U-Boote zu Beginn des Krieges nur wenig und setzte stärker auf die großen Schlachtschiffe. Das änderte sich, als U 9 am 22. September 1914 vor der niederländischen Küste einen aus den drei PanzerkreuzernAboukir, Cressy und Hogue bestehenden Blockadeverband komplett versenkte. Auf den Panzerkreuzern glaubte man nicht an eine mögliche Gefahr durch deutsche U-Boote und erkannte die Torpedos nicht, obwohl sie pressluftbetrieben waren und deutliche Spuren an der Wasseroberfläche hinterließen. Nach den ersten Explosionen nahmen die Schiffsführungen Minen als Ursache an und ignorierten Berichte über Torpedo-Blasenspuren. Diese Fehleinschätzung kostete tausende Seeleute das Leben. Der unerwartete Erfolg machte die deutschen U-Boot-Fahrer zu Helden und begünstigte den raschen Ausbau der deutschen U-Boot-Waffe. Das Ansehen der U-Boot-Fahrer gegenüber den Besatzungen auf den teuren Großkampfschiffen, die kaum zum Einsatz kamen und nur geringe Erfolge erzielten, stieg beträchtlich.
Die zu Kriegsbeginn gegenüber den U-Boot-Verbänden Großbritanniens oder Frankreichs nur kleine deutsche U-Boote-Waffe wuchs sehr schnell und erlangte gegenüber den U-Boot-Verbänden anderer Staaten eine technische Überlegenheit. Das galt besonders für die Qualität der Periskope und Torpedos, aufgrund derer sie zu einer äußerst ernstzunehmenden Gefahr für die Flotten und Handelsschiffe der Gegner wurden.
Nach dem Ende des Ersten Weltkriegs verlangsamte sich die Entwicklung militärischer U-Boote. Deutschland, dem inzwischen größten Hersteller, war die Entwicklung und Produktion im Friedensvertrag von Versailles verboten worden. Die Siegermächte hingegen sahen im Besitz einer großen offensiven U-Boot-Waffe keine Notwendigkeit.
U 995, ein Boot vom Typ VII, dem meistgebauten Bootstyp, in Laboe
Zu Kriegsbeginn sah sich die Führung der deutschen Kriegsmarine sehr starken Flotten der Garantiemächte Großbritannien und Frankreich, die die größte und die viertgrößte Flotte der Welt betrieben, gegenüber. Die wenigen deutschen Großkampfschiffe standen also grundsätzlich einem zahlenmäßig weit überlegenen Gegner gegenüber. Auch ihre Einsätze gegen alliierte Konvois waren aus verschiedenen Gründen wenig erfolgreich, zudem kam die Marineführung erst 1943 zu der Erkenntnis, dass weitreichende Radargeräte für Großkampfschiffe unerlässlich waren – die nur 8–10 Seemeilen reichenden Radargeräte (z. B. auf der Tirpitz) stellten einen entscheidenden Nachteil dar. Das Schlachtschiff Bismarck wurde bei seinem einzigen Kampfeinsatz versenkt, das Schlachtschiff Tirpitz musste drei von vier Kampfeinsätzen ergebnislos abbrechen und zwang dann Großbritannien allein durch den Stationierungsort Norwegen zwar zum Vorhalten von großen Jagdgruppen, wurde dann aber schließlich 1944 versenkt. Auch die Schlachtschiffe Scharnhorst und Gneisenau wurden versenkt. Da Großbritannien und Frankreich als Garantiemächte Polens auftraten, hoffte man, mit den relativ kostengünstig herzustellenden U-Booten maximale Versenkungserfolge zu erzielen. Die U-Boote wurden so die Hauptbedrohung für sämtliche Handelsrouten. Man ließ sie vor allem Frachtschiffe angreifen, mit dem Ziel, Großbritannien als Inselstaat von dringend benötigten Rohstoffen abzuschneiden. Trotz ihrer technischen und logistischen Grenzen und der geringen Anzahl von nur 57 Booten zu Beginn des Zweiten Weltkrieges war die U-Boot-Waffe anfangs sehr erfolgreich. Diese Erfolge überzeugten den ursprünglich skeptischen Hitler, einem verstärkten U-Boot-Bauprogramm zuzustimmen. Mehr und mehr U-Boote wurden in Dienst gestellt und ihre Anzahl näherte sich der Grundforderung des Befehlshabers der U-Boote (BdU) Karl Dönitz nach 300 Booten für einen erfolgreichen Blockadekrieg gegen England. Von den Erfolgreichsten unter den Kommandanten – den Assen – wurden teilweise enorme Versenkungsziffern erzielt. Einer der bekanntesten war Günther Prien, der 1939 als Kommandant von U 47 in die Bucht von Scapa Flow, dem stark gesicherten Heimathafen der britischen Home Fleet eindrang und dort das Schlachtschiff Royal Oak versenkte.
Seeadler auf dem Ehrenmal für die gefallenen deutschen U-Boot-Fahrer beider Weltkriege in Heikendorf bei Kiel
Weitaus wichtiger war allerdings die Versenkung von Handelsschiffen. Hierbei waren nächtliche Überwasserangriffe der bei Nacht schwer zu sichtenden U-Boote zunächst am erfolgreichsten. Nach den anfänglichen Erfolgen spürte die britische Wirtschaft schnell die Auswirkungen der vielen tausend Tonnen versenkten Schiffsraumes und es wurden umfangreiche Gegenmaßnahmen taktischer und logistischer (Geleitzugsystem) wie auch rein technischer Art eingeleitet. Der schnelle Fortschritt in der Radartechnik und die Ausstattung der Sicherungszerstörer der Konvois hiermit machten aufgetauchte U-Boote auch bei Nacht weithin erkenn- und bekämpfbar. Entzog sich das U-Boot durch Tauchen, konnte es mit ASDIC geortet und mit Wasserbomben bekämpft werden.
Versorgung eines deutschen U-Boots im Südatlantik 1941
Aufgrund der geringen Batteriekapazitäten konnten sich die überwiegend zum Einsatz gekommenen U-Boote vom Typ VII und IX unter Wasser nicht schnell genug von Sicherungseinheiten absetzen und erlitten zunehmend Verluste. Die deutsche Entwicklung und Fertigung der sogenannten „Elektroboote“ der Typen XXI und XXIII, die ihrer Zeit weit voraus waren und in hoher Zahl gebaut werden sollten, kamen durch das Ende des Krieges nicht mehr oder nur noch sporadisch zum Einsatz. Der Typ XXI war der erste U-Boot-Entwurf, der für einen überwiegenden Unterwassereinsatz konzipiert war. Die Boote dieser Typen liefen unter Wasser mit E-Maschinen schneller als aufgetaucht mit Dieselmaschinen und hatten (durch hohe Batteriekapazitäten und die Möglichkeit zum Schnorchel-Betrieb) die Fähigkeit, lange getaucht operieren zu können. Er ließ alle anderen U-Boot-Typen auf einen Schlag veralten und wurde zum Ausgangspunkt der gesamten U-Boot-Entwicklung nach 1945.
Auch Italien verfügte über eine große U-Boot-Flotte (im Juni 1940 über 100 U-Boote), und schon im Sommer 1940 operierten die ersten italienischen U-Boote im Atlantik. Die Schiffe der Königlich Italienischen Marine waren bis zur Kapitulation Italiens im September 1943 im Einsatz. Anders als die deutschen erfüllten sie aber die in sie gesetzten Erwartungen kaum, da sowohl die Konstruktion der Boote (zu großer Turm, der selbst bei Nacht weit zu sehen war) wie auch die Ausbildung der Besatzungen nicht den Erfordernissen des Handelskrieges entsprachen. Insgesamt entsprachen die italienischen Erfolge nur einem Bruchteil derer, welche die Deutschen erzielten.
Im Gegensatz zu den deutschen U-Booten waren die britischen U-Boote ursprünglich nicht für den Einsatz im Handelskrieg auf hoher See entwickelt worden. Sie dienten meist zur Überwachung der Häfen und Marinebasen unter deutscher Kontrolle. Die vorhandenen Boote der H-Klasse und L-Klasse waren Einhüllen-Unterseeboote, deren Entwürfe noch aus dem Ersten Weltkrieg stammten. Zweihüllen-Hochseeboote waren unter anderem die Boote der Thames- und T-Klasse. Von den von der Royal Navy neuentwickelten modernen Zweihüllen-Hochseebooten der A-Klasse wurden vor dem Kriegsende nur die beiden Boote Anchorite und Astute fertiggestellt, die nicht mehr zum Kriegseinsatz kamen. Militärisch bedeutend waren vor allem die im Mittelmeer operierenden britischen U-Boote, die von ihren Basen in Malta, Gibraltar und Alexandria aus erfolgreich Schiffe der Achsenmächte, die Nachschub zum nordafrikanischen Kriegsschauplatz transportieren sollten, torpedierten. Ein Großteil der Nachschubgüter für die deutsch-italienische Afrika-Armee wurde dabei anhand der Informationen des britischen Ultra Secret versenkt. Die Entzifferung des Enigma-M-Funkverkehrs ermöglichte den Briten, feindliche Marineoperationen früh zu lokalisieren und Gegenmaßnahmen einzuleiten. Der erfolgreiche Abschluss der Operation „Ultra“, bei der sich der britische Zerstörer Somali gezielt auf die Jagd nach deutschen Wetter- und Versorgungsschiffen machte, um deren Chiffriermaschinen und -schlüssel zu erbeuten, lieferte diese Möglichkeit Ende Mai 1941.
Erst gegen Kriegsende griffen sowjetische U-Boote in der Ostsee in das Kriegsgeschehen ein, wo sie die deutschen Schiffstransporte von und zum ostpreußischen Kessel bedrohten. Dabei verursachten sie drei der verheerendsten Schiffskatastrophen aller Zeiten: Am 30. Januar 1945 versenkte S-13 (С-13) die Wilhelm Gustloff, wobei mehr als 9000 Menschen ums Leben kamen. Am 10. Februar versenkte S-13 die Steuben (ca. 3400 Tote), am 16. April wurde die Goya Opfer des sowjetischen U-Bootes L-3 (Л-3) (über 7000 Tote).
Im Pazifikkrieg verfügten sowohl Japan wie auch die USA über bedeutende U-Boot-Flotten, neben denen auf diesem Kriegsschauplatz auch einige britische und niederländische U-Boote im Einsatz standen. Während die japanische Marineführung die Hauptaufgabe ihrer U-Boote in der Sicherung der eigenen Überwasser-Flottenoperationen und der Bekämpfung feindlicher Kriegsschiffe sah, konzentrierten sich die US-Amerikaner auf die Versenkung von Handelsschiffen. In Japan kam es auch zur Entwicklung und zum Einsatz von Kleinst-U-Booten, welche von den großen „Unterwasserkreuzern“ in die Nähe des Zielgebietes gebracht wurden. Außerdem baute Japan Unterwasser-Flugzeugträger, welche in einem Druckkörper bis zu drei Flugzeuge aufnehmen konnten. Geplant war, mit diesen Flugzeugen beispielsweise die Schleusen des Panamakanals oder San Francisco zu bombardieren. Zu Beginn des Krieges hatte die japanische Handelsflotte einen Schiffsraum von 6 Millionen BRT. Von diesen waren bis zum Kriegsende 5 053 491 BRT (1178 Schiffe) versenkt worden. Die aufgrund dieser Verluste eingetretenen Engpässe beim japanischen Nachschub wie auch bei der Rohstoffversorgung Japans trugen zum alliierten Sieg im Pazifik bei. Die japanische U-Boot-Waffe erlitt durch den Einsatz des Sonars bei den US-Amerikanern hohe Verluste; von insgesamt 190 U-Booten gingen 127 verloren. Oft wurden die japanischen U-Boote angegriffen, bevor sie sich überhaupt dem Ziel nähern konnten. Die US-amerikanische Marine verlor 52 U-Boote, was knapp 16 % aller im Dienst befindlichen Boote entsprach.
Obwohl sich der U-Boot-Krieg als sehr verlustreich herausgestellt hatte, gewann der strategische Wert der U-Boot-Waffe mehr und mehr an Bedeutung im Kalten Krieg. Ziel der U-Boot-Entwicklung war es nun, die Schwächen der Modelle des Zweiten Weltkriegs zu verbessern. Dies zielte besonders auf extrem lange – und auch schnelle – Unterwasserfahrten sowie große Tauchtiefen ab.
Die Entwicklung gipfelte in der Konstruktion von nukleargetriebenen U-Booten, welche die geforderten langen Tauchzeiten erfüllten. Die USA waren bei dieser Entwicklung führend, und am 21. Januar 1954 lief das erste nukleargetriebene U-Boot, die Nautilus, vom Stapel. Am 3. August 1958 passierte sie als erstes Wasserfahrzeug bei einer Tauchfahrt unter der Arktis den geographischen Nordpol.
Das nicht nukleargetriebene Forschungs-U-Boot Trieste erreichte am 23. Januar 1960 mit 10.916 Metern Tiefe den zweittiefsten Punkt der Erde.
In den folgenden Jahren entwickelten sich die U-Boote schnell weiter. Sie wurden immer größer und schlagkräftiger gebaut. Da es kaum noch spektakuläre „öffentliche“ Entwicklungen in der U-Boot-Technik zu vermelden gab und die U-Boot-Waffe insgesamt als sehr geheim eingestuft wurde, erfuhr die Öffentlichkeit in den folgenden Jahrzehnten nur noch in Form von „Katastrophen“ etwas über die modernen U-Boote.
Seit dem Zweiten Weltkrieg machen U-Boote vor allem durch spektakuläre Unfälle Schlagzeilen:
Am 9. April 1963 kam es zu einem Unfall im Atlantik. Die Thresher zerbrach bei einem Tieftauchversuch in sechs Teile. Man geht heute davon aus, dass eine Hochdruckleitung platzte und so die Ballasttanks nicht mehr rechtzeitig ausgeblasen werden konnten. Jedoch zeigte der Prototyp eines Jagd-U-Bootes auch schon vorher Steuerprobleme beim Abfangen des Schiffes bei hoher Geschwindigkeit in großen Tiefen. Es gab keine Überlebenden.
Ein für die deutsche Öffentlichkeit wichtiger Vorfall ereignete sich am 14. September 1966 mit dem Untergang von U Hai der Bundesmarine, der 19 Besatzungsmitglieder das Leben kostete.
Am 27. Januar 1968 verschwand im Mittelmeer das konventionelle französische U-Boot Minerva der Daphné-Klasse mit 52 Besatzungsmitgliedern bei Cape Sicié aus ungeklärten Umständen während einer Übung.[7]
Am 8. März 1968 ereignete sich an Bord des sowjetischen U-Boots K-129 eine Explosion, worauf das U-Boot sank. 86 Mannschaftsmitglieder starben dabei. Dies war gleichzeitig der Auftakt zum Azorian-Projekt – dem geheimen Versuch der CIA, das sowjetische U-Boot aus über 5000 Metern Tiefe zu bergen.
Im Mai 1968 verschwand die atomgetriebene Scorpion bei einer Fahrt von Gibraltar nach Norfolk nahe den Azoren. Bis heute gibt es verschiedene Spekulationen über das Verschwinden, ausgehend von einer Kollision bis hin zu einem unkontrolliert losgelaufenen Torpedo. Als am wahrscheinlichsten gilt eine Fehlfunktion einer Torpedobatterie, die zu einer Explosion im Innern führte.
Am 4. März 1970 verschwand im Mittelmeer das konventionelle französische U-Boot Eurydike, ebenfalls ein Boot der Daphné-Klasse, mit 57 Besatzungsmitgliedern bei St. Tropez aus ungeklärten Gründen.[8]
Die beschädigte K-219 an der Oberfläche, 3. Oktober 1986
Am 3. Oktober 1986 explodierte im sowjetischen U-Boot K-219 rund 680 Seemeilen nordöstlich der Bermuda-Inseln im Atlantik der Treibstoff einer der Raketen in ihrem Silo, der Raketenraum füllte sich mit Wasser. Die K-219 tauchte daraufhin auf und trieb drei Tage an der Wasseroberfläche. Am 6. Oktober sank das U-Boot schließlich aus letztlich nicht geklärter Ursache. Vier Besatzungsmitglieder starben, der Rest der Mannschaft konnte gerettet werden.
Am 12. August 2000 sank das russische U-Boot Kursk infolge mehrerer Explosionen eigener Torpedos mit seiner gesamten Besatzung von 118 Mann. 23 Besatzungsmitglieder überlebten zunächst und konnten sich in die hinterste Sektion retten, wo auch die Notausstiegsluken waren. Der Sauerstoffanteil der Atemluft war nach einigen Stunden so weit aufgebraucht, dass alle 23 erstickten.
Am 14. August 2013 kam es auf der im Hafen von Mumbai liegenden Sindhurakshak zu einer Explosion, woraufhin das U-Boot sank. 18 Menschen kamen dabei ums Leben.[10]
Am 15. November 2017 verschwand das argentinische U-Boot San Juan (S 42) unter bisher ungeklärten Umständen vor der argentinischen Küste im Südatlantik. In seinem letzten Funkspruch meldete der Kommandant einen Schwelbrand im Bereich der Bug-Batterien. Drei Stunden später nahmen Hydrophone eine Explosion im Südatlantik auf.[11]
Das Titan-U-Boot war ein privates Tauchboot, das am 22. Juni 2023 bei einer Expedition zum Wrack der Titanic verunglückte. Dabei kamen alle fünf Insassen ums Leben, darunter ein pakistanischer Geschäftsmann, Shahzada Dawood und sein Sohn sowie ein renommierter Titanic-Experte, Paul-Henri Nargeolet. Die Ursache des Unglücks ist noch unklar, aber es wird vermutet, dass das U-Boot durch einen hohen Wasserdruck in fast 4000 Metern Tiefe implodierte. Die Trümmer des U-Boots wurden einige Tage später von einem ferngesteuerten Tauchroboter in der Nähe des Titanic-Wracks entdeckt. Die US-Küstenwache und die Betreiberfirma Ocean Gate führen eine Untersuchung durch, um die genauen Umstände des Unglücks aufzuklären.
Auch nach dem Zweiten Weltkrieg kam es vereinzelt zu Kampfhandlungen, an denen U-Boote beteiligt waren. Die ersten fanden noch mit konventionellen U-Booten im Bangladesch-Krieg des Jahres 1971 statt, als Indien im Krieg zwischen Bangladesch und Pakistan intervenierte. Dabei wurde am 9. Dezember 1971 die indische FregatteKhukri vom pakistanischen U-Boot Hangor versenkt, einem Boot der französischen Daphné-Klasse. Elf Jahre später griff erstmals ein Atom-U-Boot ein Kriegsschiff an: Am 2. Mai 1982 wurde der argentinische Kreuzer General Belgrano im Falklandkrieg durch einen Torpedo des britischen U-Boots Conqueror versenkt.
Außerdem werden U-Boote zu Aufklärungszwecken eingesetzt. Zu einem internationalen Eklat kam es im Oktober 1981, als das mit Nukleartorpedos bewaffnete sowjetische U-Boot W-137 (Whiskey-Klasse) vor dem schwedischen Marinehafen Karlskrona auf eine Schäre lief und von der schwedischen Marine aufgebracht wurde. Die sowjetische Führung bestritt anschließend einen Spionageeinsatz gegen das neutrale Schweden und führte den Zwischenfall auf einen Navigationsfehler zurück.
Die größten U-Boote, die jemals gebaut wurden, sind die des sowjetischen Projektes 941 (NATO-Bezeichnung: Typhoon-Klasse), Vorbild des sowjetischen U-Boots aus dem Spielfilm Jagd auf Roter Oktober. Im Jahr 2022 stellte Russland ein noch größeres U-Boot, Projekt 09852 Belgorod, in Dienst.[12]
Da sich nach dem Zweiten Weltkrieg die Großmächte fast gänzlich auf den Einsatz von Atom-U-Booten verlegten, blieb es kleineren Marinen (hauptsächlich Deutschland, Italien, Schweden und Niederlande) überlassen, die Technik für konventionell betriebene U-Boote weiterzuentwickeln. Momentaner Stand der Technik ist die Einführung außenluftunabhängiger Antriebsanlagen, beispielsweise in Form von Brennstoffzellen, Kreislaufantrieben oder Stirlingmotoren. Beispiele dafür sind die deutsche U-Boot-Klasse 212 A, deren erstes Boot U 31 im März 2004 an die Deutsche Marine übergeben wurde, sowie die schwedische Gotland-Klasse, deren Boote seit 1996 im Einsatz stehen. U 31 verfügt als erstes U-Boot über einen Hybridantrieb aus Elektro- und Brennstoffzellen-Antrieb und ermöglicht so wochenlange Tauchfahrten ohne die Nachteile eines Nuklearantriebs (Pumpen- und Turbinengeräusche, Wärmeabgabe (Wärmeschleppe), Sicherheitsrisiken). Dieser Antrieb verleiht den Booten eine Geschwindigkeit von 12 kn aufgetaucht (≈ 22 km/h) und 20 kn getaucht (≈ 37 km/h).[13] Die nukleargetriebenen Jagd-U-Boote der meistgebauten amerikanischen Los-Angeles-Klasse erreichen aufgetaucht 20 kn, getaucht über 33 kn (≈ 60 km/h).[14]
U-Boote können nicht nur an der Wasseroberfläche schwimmen, sondern auch ganz unter Wasser tauchen. Wenn U-Boote an der Wasseroberfläche schwimmen, sind sie wie normale Schiffe leichter als das umgebende Wasser. Für eine Tauchfahrt erhöhen sie ihre Dichte, indem Ballasttanks mit Wasser geflutet werden. Wenn auf diese Weise ihre Masse größer als die des verdrängten Wassers ist, sinken sie unter die Wasseroberfläche. Dieser Vorgang wird statisches Tauchen genannt.
Während der Tauchfahrt wird angestrebt, dass ihre gesamte Masse gleich der des verdrängten Wassers ist. Dann schweben sie gemäß dem Archimedischen Prinzip im Wasser, ohne Energie für das Halten der Tiefe zu benötigen. Dieser Zustand wird allerdings nie genau erreicht. Einerseits wirken sich selbst kleinste Unterschiede zwischen der U-Boot-Masse und der des verdrängten Wassers aus. Andererseits verändert sich die Dichte des umgebenden Wassers laufend durch Änderungen des Salzgehaltes, der Menge von Schwebestoffen (Plankton) und der Temperatur des Wassers. Das U-Boot hat also immer eine Tendenz zu steigen oder zu fallen. Es muss daher eingesteuert werden. Dazu wird Wasser in Regelzellen eingelassen oder ausgedrückt.
Ein gut eingesteuertes U-Boot manövriert unter Wasser in der Vertikalen durch dynamisches Tauchen. Dazu erzeugt es während der Vorwärtsfahrt mit Hilfe von waagerechten Tiefenruderndynamischen Auftrieb oder Abtrieb. Die Tiefenruder wirken dabei ähnlich wie die Flügel eines Flugzeugs. Bei historischen U-Booten war meist jeweils ein Paar Tiefenruder vorn und achtern angebracht. Moderne U-Boote tragen die vorderen Tiefenruder häufig seitlich am Turm.
Die ersten Unterwasserfahrzeuge aus dem 15. bis 18. Jahrhundert bestanden nahezu ausnahmslos aus Holz und wurden – wenn überhaupt – nur durch Eisenzargen oder Nägel zusammengehalten. Oftmals wurden die Boote so gefertigt, dass man sinnbildlich auf ein normales Holzboot ein anderes Holzboot kielaufwärts montierte. In der Regel wurden die Holzplanken solcher Unterwasserfahrzeuge durch Pech versiegelt und zusätzlich zur Abdichtung komplett mit einer Haut aus Leder überzogen. Bei diesen „U-Booten“ handelte es sich meist um Einhüllenboote, bei denen die Tauchzellen innerhalb des Druckkörpers angebracht waren. Da die Zellen mit dem Außenwasser in Verbindung standen, mussten auch sie druckfest gebaut werden bzw. entsprechende Pumpen vorhanden sein.
Erst als es Mitte des 19. Jahrhunderts technisch gelang, die Antriebsschraube sowie die Steuerruder derart an den Rumpf anzubringen, dass die Fahrzeuge selbstständig fortbewegt und gesteuert werden konnten, ohne an der Oberfläche von einem Begleitfahrzeug gezogen zu werden, veränderte sich auch die Bauweise des Rumpfes. Nun wurden die Konstruktionen der Hüllen vermehrt durch Metalleinsätze verstärkt und Anfang des 20. Jahrhunderts wurden die ersten U-Boote mit einem kompletten Stahlrumpf gebaut.
Tauchzellen und Tanks verlagerte man ziemlich bald aus dem Druckkörper nach außen; es ergaben sich somit Einhüllenboote mit Satteltanks. Aus dem Streben nach guter Seetauglichkeit bei Überwasserfahrt entstand daraus schließlich das Zweihüllenboot, bei dem die Tauchzellen um den zylindrischen Druckkörper herumgelegt wurden. Das Boot erhielt damit eine zweite Hülle in Bootsform. Da diese im Tauchzustand innen wie außen unter gleichem Druck stand, brauchte sie nicht besonders stark zu sein. Den durch Brennstoffverbrauch bedingten Gewichtsveränderungen begegnete man dadurch, dass das Treiböl in nicht druckfesten, unten offenen Bunkern auf Seewasser schwimmend gefahren wurde.
Mit der nach bzw. während des Zweiten Weltkrieges zunehmenden technischen Entwicklung verschwand nach und nach der Überwasseraspekt des U-Bootes. Die Boote erhielten zunächst eine hydrodynamisch saubere geglättete Form, und US-amerikanische Entwicklungen rund um das Versuchs-U-Boot USS Albacore führten schließlich zur heute überwiegend gebauten Tropfenform mit zylindrischem Mittelstück. Diese wird normalerweise dadurch erreicht, dass der zylindrische Druckkörper durch freiflutende Aufbauten vorne und achtern stromlinienförmig gemacht wird. Auch das Oberdeck und der Turm sind freiflutend, es gibt aber keine durchgehende zweite Hülle. Die heute gängigen Boote sind somit weder Einhüllen- noch Zweihüllenboote und werden manchmal Anderthalbhüllenboote genannt.
Bei modernen Booten werden die Einbauten, wie Mannschaftsunterkünfte, Kommandozentrale, Antrieb usw., zunehmend akustisch entkoppelt, das heißt, mit passiver und aktiver Dämpfung und Zwischenträgern am Rumpf aufgehängt bzw. angebracht. Mehrere herkömmliche Propeller wurden durch einen einzigen vielflügligen Sichelpropeller bzw. einen Düsenpropeller oder Wasserstrahlantrieb ersetzt. Ziel ist eine weitergehende Minimierung der Schallemission an das umgebende Wasser und die Lautlosigkeit des Bootes, wodurch es quasi „unsichtbar“ wird (vgl. Tarnkappentechnik).
Folgende Grafik vermittelt einen Eindruck von der Größe älterer und moderner U-Boote im Vergleich zu einem Boeing-747-Passagierflugzeug (für die Abkürzungen siehe Militärische Klassifizierung von U-Booten):
Die Druckkörper moderner militärischer U-Boote halten normalerweise dem Wasserdruck in 600 Meter Tiefe stand. Einige sowjetische Atom-U-Boote besaßen Druckkörper aus Titan und waren in der Lage, ca. 900 Meter tief zu tauchen. Atom-U-Boote des Typs Projekt 685 konnten angeblich sogar maximale Tauchtiefen von ca. 1.300 Meter erreichen. Spezielle zivile Tiefsee-U-Boote sowie Bathyscaphen sind in der Lage, jeden Punkt des Meeresbodens zu erreichen.
U-Boote müssen in drei Dimensionen manövrieren können.
Tauchzellen: Tanks, die zur Gewichtserhöhung beim Tauchen mit Wasser und zum Auftauchen mit Luft gefüllt werden. Der Beginn des Füllens der Auftriebszellen mit Luft, manchmal auch der ganze Vorgang, wird Anblasen genannt. Ausblasen heißt die vollständige Entleerung der Zellen, wenn das Boot die Wasseroberfläche durchbrochen hat, mittels Dieselabgasen oder eines speziellen Elektrogebläses, um Druckluft zu sparen.
Regelzellen: Die Regelzellen dienen dem feinen Einstellen der Bootsmasse, um den Schwebezustand im Wasser aufrechtzuerhalten, und sind daher stets teilweise mit Luft gefüllt, um Wasser zufluten zu können. Es gibt meistens mehrere Regelzellen, bei denen dieses Luftpolster unter unterschiedlichen Drücken gefahren wird, um grobe und feine Massenänderungen durchführen zu können. Die Regelzellen werden druckfest ausgeführt.
Torpedozellen: Wenn das Boot Waffen ausstößt (meist Torpedos), muss das verlorene Gewicht ausgeglichen werden. Hierzu gibt es eigene Torpedozellen, die beim Abschuss sehr schnell geflutet werden können. Da eine Torpedosalve durchaus zehn Tonnen und mehr wiegen kann, sind diese Zellen recht groß.
Untertriebszellen: Aufgabe dieser besonderen Tauchzellen ist es, das Gewicht des U-Bootes so schnell wie möglich zu vergrößern, um schnellere Alarmtauchzeiten zu erreichen. Diese betrugen bei Kampfbooten im Zweiten Weltkrieg teilweise weniger als 30 Sekunden. In modernen Atom-U-Booten findet diese Technik keine Verwendung mehr, da sie in der Regel nur einmal während ihres Einsatzes tauchen müssen und erst nach Monaten wieder auftauchen. Sie benötigen daher zum Tauchen teilweise mehrere Minuten.
Trimmzellen: Sie dienen dazu, das Boot null-lastig und auf ebenen Kiel einzusteuern. Das Trimmsystem enthält eine feste Menge Wasser, die nach vorne oder nach hinten gedrückt werden kann. Dies geschieht durch Druckluft im gegenüberliegenden Tank oder mit einer Pumpe in der Trimmleitung; letzteres hat den Vorteil, Druckluft zu sparen. Die Trimmzellen sind im Allgemeinen nicht druckfest (im Gegensatz zu den Regelzellen).
Tiefenruder: Sie übernehmen die Feinabstimmung im getauchten Zustand. Die Anordnung der vorderen Tiefenruder variiert bei modernen U-Booten sehr stark. Am Turm angebrachte Tiefenruder sind nicht in der Lage, den Tauchvorgang zu unterstützen, und erschweren das Auftauchen in vereistem Wasser. Kleine U-Boote haben manchmal eine dynamische Tiefensteuerung, d. h., sie steuern nur mit Tiefenrudern. Diese Technik wird vor allem bei unbemannten U-Booten und im Modellbau verwendet.
Für die Fahrt über Wasser können im Prinzip alle Antriebe verwendet werden, die für Schiffe in Frage kommen. Gewöhnliche Schiffsaggregate (Dieselmotoren, Gasturbinen) sind Verbrennungsmotoren und benötigen große Mengen Sauerstoff für den Verbrennungsvorgang, der bei Überwasserfahrt oder Schnorchelfahrt aus der Luft angesaugt werden kann.
Normale Dampfmaschinen haben das gravierende Problem, dass sie sehr massig und voluminös sind und der Prozess der Dampferzeugung träge ist, d. h., bevor er genutzt werden kann, muss man lange anheizen, und dann kann man die Dampferzeugung nicht ohne weiteres wieder abstellen, was für ein U-Boot, das schnell auf- und abtauchen soll, kaum sinnvoll ist.
Petroleum- und Benzinmotoren erfüllen prinzipiell die Anforderung, bei geringem Gewicht sehr schnell eine hohe Leistung bereitstellen zu können und auch schnell wieder abgestellt werden zu können. In der Praxis haben sich aber die reizenden und leicht entzündlichen Dämpfe des Treibstoffs als problematisch erwiesen. Immer wieder kam es zu Beginn der U-Boot-Entwicklung zu Motorbränden und Verpuffungen in den Booten, und die Besatzungen litten unter erheblichen Reizungen.
Dieselmotoren erwiesen sich für lange Zeit als das geeignetste Aggregat, um das Boot über Wasser anzutreiben. Seit Erfindung eines Schnorchels für U-Boote kann der Dieselmotor sogar auf Periskoptiefe benutzt werden. Allerdings ist das Boot damit an eine sehr geringe Tauchtiefe gebunden.
Maschinenraum des U-Bootes HMAS Onslow (1969) (Royal Australian Navy)
Das eigentliche Antriebsproblem stellt sich aber auf Tauchfahrt, da hier nicht genug Luft für den Betrieb von Verbrennungsmotoren zur Verfügung steht und bei größeren Tauchtiefen auch Abgase nicht mehr abgeleitet werden können. Es müssen also luftunabhängige Antriebe zur Anwendung kommen.
Muskelkraft: Die ersten U-Boote wurden von Hand mit Fußkurbel, Tretrad oder Handkurbel angetrieben. Zu nennen wären hier etwa der Brandtaucher, Bushnells Turtle, Fultons Nautilus und die Hunley der Südstaaten im Sezessionskrieg.
Dampfantrieb: Experimente mit einem auf Chemikalien basierenden Dampfantrieb beim sog. Flotten-U-Boot auf Kolbenmotor- bzw. Turbinenbasis wurden als Irrweg bald aufgegeben. Dieser Antrieb findet sich allerdings in abgewandelter Form bis heute beim Torpedo.
Elektroantrieb mit Akkumulatoren: In Kopplung mit einem Verbrennungsmotor, der die Akkumulatoren bei Überwasserfahrt oder Schnorchelfahrt auflädt, ist er bis heute der Antrieb für fast alle nichtatomar betriebenen U-Boote. Schon während des Ersten Weltkrieges bildete sich dieser kombinierte Diesel-Elektro-Antrieb als Standard heraus. Auch als alleiniger Antrieb geeignet für kleine U-Boote, beispielsweise Forschungs-U-Boote und Tauchertransportmittel, aber auch für Roboter und Torpedos.
Walter-Antrieb mit hochkonzentriertem Wasserstoffperoxid: Während des Zweiten Weltkriegs gab es auf deutscher Seite Versuche mit einem außenluftunabhängigen Turbinenantrieb auf der Basis von hochkonzentriertem Wasserstoffperoxid in Verbindung mit Dieseltreibstoff. Das Wasserstoffperoxid wurde in der Zersetzerkammer über als Katalysator wirkendes Mangandioxid (Braunstein) geleitet, wo es sich rasant unter sehr starker Wärmeentwicklung zersetzte, anschließend wurde in den sauerstoffhaltigen Heißdampf Dieseltreibstoff eingespritzt, der sich sofort selbst entzündete. Das entstehende Gas-Dampf-Gemisch trieb anschließend eine Turbine an. Es handelte sich um die sogenannten Walter-U-Boote, benannt nach ihrem Konstrukteur Hellmuth Walter. Als Vorteile waren längere Tauchzeiten und wesentlich größere Unterwassergeschwindigkeit zu nennen. Der Antrieb wurde nicht in die Serienproduktion übernommen; wesentliche Ergebnisse der Bootsentwicklung, etwa die glatte Rumpfform, kamen allerdings noch im Krieg zum Einsatz (Typ XXI, Typ XXIII) und beeinflussten merklich sämtliche Nachkriegsentwicklungen. Nach dem Zweiten Weltkrieg setzte Großbritannien die Forschung am Walter-Antrieb fort, aufgrund der Gefährlichkeit der verwendeten Chemikalien und des hohen Treibstoffverbrauchs wurde dieser extrem leistungsfähige Antrieb jedoch bald aufgegeben. Ein Fehler im Wasserstoffperoxid-Antrieb eines Torpedos soll zum Untergang des russischen U-Bootes Kursk geführt haben.
Kreislauf-Diesel-Antrieb: Der Dieselmotor (bzw. ein anderer Verbrennungsmotor) wird mit einem Sauerstofflieferanten, etwa Flüssigsauerstoff (LOX) oder Wasserstoffperoxid, unter Wasser betrieben. Die Verbrennungsgase werden gewaschen (ein guter Teil des Kohlendioxids durch Lösen in Wasser entfernt) und der fehlende Sauerstoff vor der erneuten Verbrennung wieder zugesetzt. Die CCD-Technologie (Closed Cycle Diesel) wurde Mitte der 1990er-Jahre durch TNSW auf Unterseeboot U1 – das auch als Erprobungsträger für die Brennstoffzelle genutzt wurde – erfolgreich erprobt, konnte sich aber auf dem internationalen Markt nicht durchsetzen.
Nuklearantrieb: Bei Atom-U-Booten werden als Hauptantriebsmaschinen Dampfturbinen eingesetzt. Der Dampf wird wiederum von einem Kernreaktor erzeugt. Für Manöverfahrten kann oft auch ein elektrisch betriebener Hilfsantrieb auf die Propellerwelle gekoppelt werden. Hilfsdampfturbinen erzeugen über Generatoren Strom, der wiederum der Versorgung der elektrotechnischen Einrichtungen dient. Da durch Elektrolyse auch Sauerstoff sowie Trinkwasser aus dem Meerwasser gewonnen werden kann, können U-Boote mit Nuklearantrieb monatelang unter Wasser bleiben.
Stirling-Motor: In einigen U-Booten der schwedischen und japanischen Marine, möglicherweise auch in der Marine der Volksrepublik China, kommen außenluftunabhängige Stirlingmotoren zum Einsatz, die durch ihre besondere Laufruhe die Geräuschtarnung verbessern. Stirlingmotoren funktionieren aufgrund eines Temperaturgradienten, daher wird kein Abgas produziert und muss so auch nicht ausgestoßen werden.
MESMA-Antrieb: Eine französische Entwicklung stellt dieser Kreislaufdampfturbinenantrieb dar. Der eigentliche Dampfkreislauf ist vom Ethanol-Verbrennungskreislauf, analog zu den großen Kessel-Turbinen-Schiffsantrieben, getrennt. Flüssigsauerstoff (LOX) ersetzt das frühere Wasserstoffperoxid der Walter-Antriebe, die Turbine wirkt nicht mehr direkt auf die Schraubenwelle, ein Generator sorgt für die akustische Entkoppelung. Derartige Anlagen kommen in der spanischen und pakistanischen Marine zur Anwendung.
Brennstoffzellen: Auch bei diesen Booten erfolgt der Antrieb letztlich durch Elektromotoren. In der Brennstoffzelle wird aber die Energie in einem chemischen Treibstoff nicht über den Umweg der Verbrennung erzeugt, sondern katalytisch direkt in elektrischen Strom verwandelt, der dann die Elektromotoren antreibt. Die Entwicklung dieser Technik begann bereits gegen Ende des Zweiten Weltkriegs. Das Interesse, Brennstoffzellen für U-Boote zu benutzen, ist also wesentlich älter als das der Automobilindustrie. Heute stellt diese Antriebsform wohl – neben dem Nuklearantrieb – die fortschrittlichste dar. Sowohl die Unabhängigkeit vom Luftsauerstoff als auch ein Minimum an beweglichen Teilen, die Geräusche verursachen, lange Verweilzeiten unter Wasser und die geringe Abwärme entsprechen den Anforderungen an moderne militärische U-Boote. Mit den Klassen 212 A und 214 wurden mittlerweile in einigen Marinen Brennstoffzellen-U-Boote aus deutscher Konstruktion eingeführt.
Magnetohydrodynamischer Antrieb (MHD-Antrieb): Hierbei wird um das U-Boot bzw. durch eine Antriebsdüse ein sich kontinuierlich änderndes Magnetfeld gelegt. Durch elektromagnetische Effekte (Lorentzkraft) auf die leitfähigen Salzionen im Meerwasser wird damit ein Wasserstrahl erzeugt, der nach dem Rückstoßprinzip das U-Boot antreibt. In der Praxis wurde diese Antriebstechnik in den 1990er-Jahren von dem japanischen Unternehmen Mitsubishi auf dem Erprobungsträger Yamato 1 angewendet, brachte jedoch nur eine enttäuschende Fahrleistung von 8 Knoten (15 km/h) auf.
Auch nach dem Schließen der Außenluken zur Tauchfahrtatmen die Menschen im Bootsinneren Kohlendioxid (CO2) aus und verbrauchen Sauerstoff. Sauerstoff muss ergänzt und Kohlendioxid entfernt werden.[15]
Abhängig vom Luftraum im Bootsinneren, der Personenanzahl und ihrer körperlichen Aktivität steigt der CO2-Gehalt der Atemluft binnen einiger Stunden von der Außenluft-Konzentration von etwa 0,04 % auf noch akzeptable 1,0 bis 1,5 %. In etwa der doppelten Zeit sinkt der Sauerstoffgehalt der Luft von anfänglich 21 % auf noch akzeptable 17 %.[16][17] Eine höhere CO2-Konzentration von 4 % kann nur kurzfristig ertragen werden, 5 % sind giftig.[17] Ohne Lufterneuerung wird deshalb nach einigen Stunden die Zuführung von Frischluft durch Lüften oder eine Lufttechnik notwendig, die die Außenluft mit der Innenluft des Bootes austauscht. Ansonsten müssen, um eine Vergiftung der Menschen an Bord zu vermeiden, Filter eingesetzt werden, die das CO2-Gas binden. Konventionelle Filter verlieren mit der Zeit an Wirkung. Moderne Systeme haben einen Kreislauf zur kontinuierlichen CO2-Reinigung, etwa mit Hilfe eines Scrubber-Systems, bei dem erwärmtes Monoethanolamin eingesetzt wird, um das CO2 aus der Luft zu binden und es in einen geschlossenen Tank zu transportieren, wo es beim Abkühlen des Monoethanolamins wieder freigesetzt wird.[15]
Der Sauerstoff, den die Menschen an Bord eines U-Bootes im Tauchbetrieb benötigen, muss an Bord mitgeführt oder erzeugt werden.[18] Bereits 1620 entwickelte Cornelis Jacobszoon Drebbel die Idee, den Sauerstoff zu ergänzen, indem man Kaliumnitrat verwendet, bei dessen Erhitzung Sauerstoff freigesetzt wird. Heute ist das Mitführen eines zusätzlichen Vorrates von Sauerstoff in Gasflaschen üblich, weil diese sich fein dosieren lassen.[18]
Lufterneuerungsanlagen kamen um 1900 auf. Das erste U-Boot der Kaiserlichen Marine U 1 verfügte über eine Lufterneuerungsanlage vom Drägerwerk Lübeck. Dräger hatte geschlossene Atemschutzgeräte für den Bergbau entwickelt. Das verwendete Prinzip wurde auf das Innere eines U-Bootes übertragen. Auch die folgenden U-Boote, mindestens bis U 12 und auch spätere Boote, waren mit Dräger-Systemen ausgerüstet.[19]
Bei Atom-U-Booten (mit Kernenergie angetriebenen U-Booten) kann der von der Besatzung verbrauchte Sauerstoff auch durch Sauerstoff ersetzt werden, der an Bord erzeugt wird. Dazu wird Energie aus dem Antriebssystem verwendet, um mittels Elektrolyse Wasser (H2O) in seine Bestandteile – Wasserstoff und Sauerstoff – aufzuspalten, so dass ein Auftauchen zum Luftaustausch nicht mehr nötig ist.[15]
Auch andere Luftverunreinigungen (zum Beispiel Dämpfe, Geruchsstoffe und Fette) müssen im Tauchbetrieb entfernt werden. Man kann unerwünschte Moleküle in der Atemluft in einer Anlage zur katalytischen Verbrennung aufspalten; dabei wird allerdings Sauerstoff verbraucht.[15] Stäube werden mit Staubabscheidern ('Elektrofilter') abgeschieden.
Wenn ein U-Boot sämtliche seiner Tauch- und Regelzellen mit der an Bord befindlichen Druckluft anbläst, leitet es damit einen schnellen Auftauchvorgang ein, den man Notauftauchen nennt. Verglichen mit quasistatischem (regulär langsamem) Auftauchen durchbricht bei diesem Vorgang aufgrund der Massenträgheit ein vergleichsweise großer Teil des Bootes die Wasseroberfläche.
Wenn das U-Boot in steilem Winkel zur Wasseroberfläche steigt, geht der Auftauchvorgang am schnellsten.
Beispiele:
Im Oktober 1986 entschied sich der Kommandant des atomgetriebenen sowjetischen U-Bootes K-219 bei einer Tiefe von ungefähr 350 m zum Notauftauchen. Nur zwei Minuten nach einer Explosion an Bord durchbrach die K-219 die Wasseroberfläche.
Die USS Greeneville (SSN-772) rammte 2001 bei einem simulierten Notauftauchen ein japanisches Fischerboot.
Ein sowjetisches Patrouillen-U-Boot aus Projekt 613 im Hafen von Nakskov (Dänemark) als Museumsschiff. (Verschrottet 2011)Schallschatten eines U-BootsDas japanische U-Boot JDS Oyashio (SS 590) der gleichnamigen Klasse im US-Marinestützpunkt Pearl Harbor
Viele Staaten besitzen militärische U-Boote, genaue Daten über die Zahlen sind jedoch oft geheim.
Die Stärke von U-Booten gegenüber Überwasserschiffen liegt darin, dass sie versteckt operieren und nur schwer entdeckt werden können.
Da U-Boote nicht optisch erfassbar sind, weil das Meer in größeren Tiefen dunkel ist und Radar unter Wasser nicht funktioniert, können sie auf größere Entfernungen nur akustisch lokalisiert werden, auf kurze Entfernungen auch durch die Erwärmung des Wassers durch den Antrieb oder eine Verzerrung des Erdmagnetfeldes durch die Stahlhülle.
Deshalb wird bei der Konstruktion besonders darauf geachtet, dass ein U-Boot so leise wie möglich ist. Dies wird durch einen stromlinienförmigen Bootskörper, speziell geformte Propeller, akustische Entkopplung insbesondere von Kolbenmaschinen und Außenhülle (samt Schraube) und Dämmung der Außenhülle mit Elastomer erzielt.
Die ursprüngliche Aufgabe von U-Booten war die Bekämpfung von Überwasserschiffen. In dieser Rolle erlangten die U-Boote in beiden Weltkriegen ihre Bedeutung. Mit Beginn des Nuklearzeitalters kamen zwei weitere Hauptaufgaben hinzu: Strategische U-Boote wurden mit nuklearen Raketen ausgerüstet und dienten der nuklearen Abschreckung. Sie bildeten einen Teil der sogenannten Erstschlagskapazität, konnten aber auch zur Zweitschlagskapazität gerechnet werden, die einen gegnerischen Angriff auf das eigene Land überleben und für einen Gegenschlag bereitstehen sollten. Gleichzeitig wurden zur Jagd auf gegnerische strategische U-Boote spezielle Jagd-U-Boote entwickelt. Für beide Aufgaben verwendete man in erster Linie, aber nicht ausschließlich, atomgetriebene U-Boote. In jüngster Zeit wurden Jagd-U-Boote mit nichtnuklearem, außenluftunabhängigem Antrieb entwickelt. Bei der Deutschen Marine und einigen Verbündeten werden seit 2004 Boote mit dem in Deutschland entwickelten Brennstoffzellen-Antrieb beschafft. In der Deutschen Marine sind es die U-Boote der Klasse 212 A, die nach und nach in Dienst gestellt werden.
Neben diesen klassischen Aufgaben hat die Aufklärung mit U-Booten an Bedeutung gewonnen. Aufgrund ihrer Fähigkeit, ungesehen operieren und mit akustischen Sensoren sehr weit horchen zu können, bieten U-Boote gerade in Szenarien unterhalb der Schwelle offener Konflikte den Vorteil, wichtige Erkenntnisse sammeln zu können. Eine weitere Sonderaufgabe ist der Einsatz von Kampfschwimmern und anderen Spezialeinheiten vom U-Boot aus. Beide Aufgaben können von herkömmlichen oder speziellen U-Booten wahrgenommen werden.
U-Boote unterscheiden sich in unterschiedliche militärische oder zivile Typen, je nachdem, welcher Zweck und welcher Auftrag dem jeweiligen U-Boot zukommt. Da U-Boote heute jedoch überwiegend militärisch eingesetzt werden, überwiegt in der nachfolgenden Liste der Anteil der diversen militärisch genutzten U-Boot-Typen:
Atom-U-Boote können lange Strecken zurücklegen und sind oft sehr groß (bis zu 48.000 Tonnen Verdrängung).
Strategische Raketen-U-Boote (engl. SSBN / frz. SNLE) dienten der nuklearen Abschreckung (Siehe Ohio-Klasse und Vanguard-Klasse). Erste U-Boote dieser Art entstanden durch Umbauten von Angriffs-U-Booten (vgl. George-Washington-Klasse). Die ersten Planungen gingen noch auf die deutschen A4-(V2)-Raketen bzw. den vorbereiteten Einsatz von US-amerikanischen A4 (V2)-Nachbauten gegen Japan zurück. Im Zuge der Abrüstung gab es Überlegungen, einige Boote für konventionelle Lenkflugkörper bzw. dem Transport von Spezialkräften zu nutzen.
Angriffs- oder Jagd-U-Boote (auch taktische U-Boote) sind gewöhnlich mit Torpedos bewaffnet, um andere Schiffe oder U-Boote anzugreifen. Daneben können sie auch mit Marschflugkörpern für den Angriff auf Landziele oder lohnende Seeziele (wie Flugzeugträgerkampfgruppen) bestückt sein. Ist dies ihre Hauptaufgabe, werden sie als U-Boote mit Marschflugkörpern bezeichnet. Jagd-U-Boote existieren mit einer Vielzahl von Antriebsformen. Atomar getriebene Jagd-U-Boote dienen der Bekämpfung gegnerischer U-Boote. Jagd-U-Boote stellen die wirkungsvollste Waffe gegen U-Boote mit ballistischen Raketen dar, da diese oft getaucht unter dem Eis operieren. Außerdem ist die Sensorenreichweite getauchter U-Boote weit größer als die von Überwasserschiffen oder Flugzeugen. Jagd-U-Boote zeichnen sich vor allem durch ihre hohe Geschwindigkeit aus. So gehören die russischen Alfa-Klasse-U-Boote zu den schnellsten existierenden U-Booten.
Versorgungs-U-Boote bzw. U-Boot-Tanker (Zweiter Weltkrieg): Aufgabe dieser Boote war es im Zweiten Weltkrieg, andere U-Boote auf See mit Nachschub zu versorgen (Milchkühe). Die großen, aber auch schwerfälligen und nahezu unbewaffneten Boote waren ein leichtes Ziel.
Handels-U-Boote: Sie wurden nur im Ersten Weltkrieg eingesetzt. Die einzigen je gebauten und eingesetzten Handels-U-Boote, die einer zivilen Reederei gehörten, waren das U „Deutschland“ und U „Bremen“. Im Zweiten Weltkrieg wurden lediglich militärische U-Boote des Typs IX D – die sog. Monsunboote, die im Indischen Ozean operierten – für die Rückreise nach Deutschland in Penang mit Kautschuk, Wolfram, Zinn, Chinin und Opium beladen. Sie durchbrachen die alliierte Seeblockade. In den 1970er-Jahren bestanden Pläne, große U-Boote für den arktischen Rohöltransport einzusetzen.
U-Boot-Minenleger: Noch im Ersten Weltkrieg kamen spezialisierte U-Boote als Minenleger zum Einsatz. Bereits im Zweiten Weltkrieg konnte jedoch die Verlegung speziell hierfür entwickelter Grundminen über die Torpedorohre (sog. Torpedominen) erfolgen. Heute wird diese Funktion ausschließlich über die Torpedorohre bzw. spezielle äußere Minengürtel sichergestellt.
U-Kreuzer wurden im Ersten Weltkrieg und in der Zwischenkriegszeit für den Handelskrieg nach Prisenordnung entwickelt. Sie waren daher neben Torpedos auch mit starker Artillerie bewaffnet, trugen Beiboote und sogar Beobachtungsflugzeuge. Das größte U-Boot vor dem Zweiten Weltkrieg, die französische Surcouf, war ein solcher U-Kreuzer. Flugzeuge dienten auf japanischen U-Booten zur Erkundung großer Gebiete – Pläne zur Bombardierung des Panamakanals im Zweiten Weltkrieg durch sechs Seiran-Flugzeuge der U-Boote I-400 und I-401 bestanden zwar, wurden jedoch nicht ausgeführt, da die beiden U-Boote erst im Frühsommer 1945 einsatzbereit waren. Die wenig erfolgreichen Flotten-U-Boote waren primär dazu gebaut, aufgetaucht mit Dampfantrieb im Verband der regulären Flotte mitzufahren. Die Idee von Unterwasser-Flugzeugträgern wird von den USA mit dem DARPA/Hydra-Programm für Drohnenträger wieder aufgenommen.[20]
Küsten-U-Boote sind in der Regel kleiner und damit wendiger gebaut. Sie operieren primär mit konventionellem Antrieb im Bereich des Kontinentalschelfes.
Andere militärische U-Boot-Aufgaben:
Aufklärung: Küstenaufklärung, Aufklärung mit Schlepptragschrauber (Bachstelze) bzw. Bordflugzeug (s. o.)
Entwicklung: Erprobung neuer Techniken, etwa USS Albacore, die deutschen Walter-Boote und die französische Gymnote
Transport: Kampfschwimmer, bemannte Torpedos, Versorgungsmittel, Kurierdienste etc.
Rettung: Rettung oder Bergung verunglückter U-Boot-Besatzungen.
Aktuelle (dunkelblau) und ehemalige (hellblaue) Betreiberstaaten militärischer U-Boote
Zur Bezeichnung von U-Boot-Typen werden in der Fachliteratur meistens die Standards der US Navy benutzt. Diese geben Aufschluss über Antrieb und Verwendungszweck eines U-Bootes.
Die frühere sowjetische und heutige russische Marine verwendet ein ähnliches System, das Kombinationen aus der Abkürzung für U-Boot (PL) ergänzt um Kürzel für Antriebsart und Bewaffnungstyp zulässt:[21]
U-Boote verfügen über verschiedene Sensoren und Beobachtungsgeräte, mit denen sie Objekte orten können.
An oder direkt unter der Wasseroberfläche kann bei modernen U-Booten ein Radarsensor oder ein Sehrohr aus der Oberseite des Turms ausgefahren werden:
Das Sehrohr, oder auch Periskop, erlaubt eine optische Überprüfung der Umgebung im Nahbereich, kann aber selbst vom Gegner gesehen oder durch seine Radarrückstrahlung geortet werden. Moderne U-Boote haben in ihren Periskopen oft ein zuschaltbares Nachtsichtgerät installiert, um auch in der Dunkelheit zu funktionieren.
Das Radar des U-Bootes kann aktiv eingesetzt werden, um seinerseits Objekte durch die Reflexion ausgesendeter Funkwellen zu erkennen. Da ein Gegner diese ausgesendeten Signale orten und so auch die Position des Bootes ermitteln kann, können heute auch Antennen von U-Booten ausgefahren werden, die passiv die Radarsignale fremder Sender erkennen können.
Unter Wasser kann ein U-Boot andere Schiffe nur akustisch über deren Geräuschabstrahlung orten. Die entsprechenden Sensoren werden als Sonarsensoren bezeichnet.
Objekte können dabei passiv über Hydrophone anhand der Geräusche, die sie erzeugen, geortet werden, oder das U-Boot sendet selbst aktiv einen Geräuschimpuls aus und erkennt an der Reflexion dieses Impulses die Position eines Objektes. Der ausgesendete Geräuschimpuls kann jedoch von anderen Hydrophonen erkannt und die Position des U-Bootes so ermittelt werden.
Die Wichtigkeit von Sonarsensoren führte dazu, dass sie bei der Konstruktion von U-Booten eine immer bedeutendere Rolle spielen. Um möglichst wenig in ihrer Leistung durch Störgeräusche beeinträchtigt zu werden, müssen Hydrophone so weit wie möglich vom Propeller und der Antriebsanlage entfernt montiert werden, so dass sich der Hauptsensor des Sonars im Bug eines U-Bootes befindet. Diese Sensoren im Bug setzen sich aus vielen einzelnen Hydrophonen zusammen, die in einer zylindrischen oder kugelförmigen Struktur montiert sind.
Da die eigenen Antriebsgeräusche aber die Ortung von Geräuschen hinter dem Boot erschweren, kann in vielen Fällen an mehreren hundert Meter langen Kabeln ein so genanntes Schleppsonar (engl. Towed Array / TAS) hinter dem U-Boot hergezogen werden. Dies bringt einige Vor- aber auch Nachteile mit sich. So vergrößert sich die Empfindlichkeit des passiven Sonars erheblich, da einerseits wesentlich mehr Hydrophone am Schleppkabel angebracht werden können, und andererseits der Abstand zum Antrieb des U-Bootes die Störgeräusche reduziert. Dies führt zu einer signifikant gesteigerten Empfindlichkeit, welche eine erhöhte Horchreichweite und Peilgenauigkeit gewährleistet. Ein Nachteil des Schleppsonars besteht in seiner Länge (manche bis über einen halben Kilometer lang) und seinem Gewicht. Die Manövrierfähigkeit des U-Bootes wird dadurch eingeschränkt und ebenfalls die Geschwindigkeit, wobei letzteres das geringere Problem ist, da das Schleppsonar sowieso nur bei langsamer Fahrt oder Schleichfahrt angewendet wird. Die Einholdauer des Schleppsonars ist abhängig von der Länge des Kabels und kann durchaus länger als eine Minute dauern, was in kritischen Situationen aber schon „zu lange“ sein kann. Muss in einer Krisensituation schnell die Geschwindigkeit erhöht, ein enges Wendemanöver eingeleitet oder die Tauchtiefe rapide verändert werden, bleibt oftmals nichts anderes übrig, als das Schleppsonar zu kappen.
Grundsätzlich gilt, dass ein U-Boot umso schwerer zu lokalisieren ist, je kleiner und leiser es ist. Dieselelektrisch betriebene U-Boote haben deswegen im getauchten Zustand oft Vorteile gegenüber den wesentlich größeren Atom-U-Booten. Der Hauptvorteil von Atom-U-Booten sind ihre Ausdauer und Geschwindigkeit. Hohe Geschwindigkeiten verringern allerdings die Sensorenreichweite erheblich und vergrößern den Geräuschpegel. Zusätzlich verursacht die hohe Temperatur des Reaktors zahlreiche Probleme. Bei modernen Kernreaktoren kann bei geringer Leistungsabgabe die Kühlung allein durch Konvektion erfolgen. Ansonsten sind Kühlwasserpumpen notwendig, welche Geräusche erzeugen, die sich über den Schiffskörper bis ins Wasser ausbreiten und dort zu lokalisieren sind. Die Abwärme aus dem Kühlwasser von Kernreaktoren ist sogar durch Satelliten zu orten. Eine weitere Möglichkeit, die Eigengeräusche eines U-Bootes zu dämpfen, besteht darin, alle Maschinen auf einer freischwingenden, gummigelagerten Plattform aufzubauen, um so die Geräuschübertragung auf den restlichen Schiffskörper zu vermindern. Speziell geformte Propeller sorgen für eine Minimierung von Kavitationsgeräuschen.
Neben der Dämpfung der Eigengeräusche kommen auch Maßnahmen zum Einsatz, welche die Ortung durch feindliches Sonar erschweren sollen. So dämpft eine Oppanol-Hülle – eine etwa 4 mm dicke Gummibeschichtung – die Schallrückstrahlung im Frequenzband zwischen 10 und 18 kHz bis auf 15 %. Die Wirkung des Schutzmittels ist dabei stark abhängig von Salzgehalt, Luftgehalt und Temperatur des Wassers. Diese Technik wurde im Einsatz erstmals 1944 bei dem deutschen U-Boot U 480 unter dem DecknamenAlberich-Beschichtung angewandt. Durch die spezielle Gestaltung des Bootsrumpfes lässt sich die Sonarrückstrahlfläche eines U-Bootes reduzieren, so dass ein einfallender Sonarimpuls abgelenkt oder gestreut wird und nur noch ein sehr schwaches Echo in Richtung des Senders zurückgestrahlt wird.
Die Schiffshülle besteht bei einigen U-Boot-Klassen aus einem nicht magnetisierbaren Stahl. Damit wird die Ortung durch die Erfassung der vom U-Boot erzeugten Verzerrung des Erdmagnetfeldes so gut wie unmöglich.
Seit dem Zweiten Weltkrieg werden auch Funkmessbeobachtungsgeräte auf U-Booten eingesetzt, welche die Besatzung des U-Bootes vor einer möglichen Radarortung durch gegnerische Flug- und Seeziele warnen sollen.
Ein Schutzmittel besteht im Ausstoßen von Täuschkörpern („Bolden“). Ein Täuschkörper kann dabei ein Auftriebskörper sein, der Calciumhydrid (CaH2) enthält und vom U-Boot ausgestoßen werden kann. Er schwebt im Wasser und erzeugt dabei Wasserstoffblasen,[22] die für die aktive Sonar-Ortung ein Scheinziel vortäuschen sollen, hinter dem das gefährdete U-Boot ablaufen kann. Ein anderes Mittel ist das Ausstoßen oder Nachschleppen von Täuschkörpern, welche die Geräusche des U-Bootes bzw. dessen Antriebs imitieren und so die passive Sonarortung herannahender Torpedos in die Irre führen sollen.
Rezente Kommunikationswege sind der Längstwellenfunk, Kurzwellenfunk und Satellitenfunk. Die Kommunikation mit getauchten U-Booten ist technisch schwierig umzusetzen. Nur sehr langwellige Radiosignale (VLF, Very Low Frequency, Längstwelle) können etwa 10 bis 30 Meter tief ins Meerwasser eindringen. Wenige Streitkräfte verfügen bis heute über die Möglichkeit, Daten an U-Boote in Tiefen über 30 m zu senden.
Bei aufgetauchten Booten nutzt die US-NavyKurzwellenfunk, und ihr Submarine Satellite Information Exchange Sub-System (SSIXS), eine Komponente des Navy Satellitensystems Navy Ultra High Frequency Satellite Communications System (UHF SATCOM). Auch die spanischen U-Boote der S70 Agosta-Klasse wurden mit einem Satelliten-Kommunikationssystem von Indra Sistemas nachgerüstet. In die U-Boote der Klasse 212 A der Deutschen und Italienischen Marine wurde ebenso das Indra-Satellitenkommunikationssystem (X-Band) mit einer Leistung von 128 kB/s zur Sprach- oder Datenübertragung in Periskoptiefe integriert. Das System arbeitet IP-basiert und die Antennenanlage ist zwei- oder drei-Achsen stabilisiert.[23]
Die Navigation unter Wasser mit gängigen elektronischen Navigationsverfahren ist nicht möglich. US-amerikanische U-Boote nutzen ein aufwendiges Trägheitsnavigationssystem, das den eigenen Standort vom letzten empfangenen GPS Signal aus weiter berechnet.
Während des Zweiten Weltkrieges nutzte das Deutsche Reich für die Kriegsmarine den sogenannten Längstwellensender Goliath auf 16,55 kHz (Hauptfrequenz) zur Übermittlung von Nachrichten an getauchte U-Boote.[24][25] Im Kalten Krieg betrieben die USA den Längstwellensender Sanguine auf 76 Hz und die Sowjetunion den Längstwellensender ZEVS auf 82 Hz (also auf SLF (Super Low Frequency)). Die dabei nur geringe mögliche Datenrate erlaubte nur eine Art „Anrufsignal“, um U-Boote zum Beispiel aufzufordern, bis ca. 15 Meter unter die Wasseroberfläche aufzusteigen, um dort auf Längstwelle (VLF, 3–30 kHz) mit höherer Datenrate Meldungen entgegenzunehmen, ohne dabei Antenne, Bojen etc. über der Wasseroberfläche positionieren zu müssen. Zur VLF-Übertragung dient den USA die Marinefunkstelle Cutler. Die Ausstrahlungen im SLF-Bereich wurden von den USA im September 2004 aufgegeben und auch der russische Sender auf 82 Hz ist inaktiv (Stand 2020).
Während elektromagnetische Datenübertragung nur bis 10 m oder im günstigsten Fall über bis zu 300 m Unterwasserdistanz funktioniert, reicht akustische Unterwassertelefonie (Gertrude) der NATO bis 10 km. Bei festen Kabelverbindungen zur Kommunikation mit Bathysphären und Unterwasserplattformen sind in die Leitungen für Energie und Atemluft auch die Kommunikation integriert.
Bis in die 1980er Jahre wurde weltweit von U-Booten in Morsetelegraphie (cw) gefunkt. Heute wird analoge und digitale Telefonie und verschlüsselte Funkfernschreibmethoden verwendet. Der von der Deutschen Marine für NATO-Boote betriebene Marinefunksendestelle Rhauderfehn strahlt einseitig ein MSK-codiertes Fernschreib-Signal aus.
Falls große Datenmengen auszutauschen sind oder das U-Boot nicht nur empfangen, sondern auch senden muss, ist es aber gezwungen, die Wasseroberfläche mit konventionellen Antennenmasten oder Bojen zu durchdringen. Technologien für längere Nachrichten beruhen auf Satelliten als Relaisstellen, mit eigenem Nachrichtenpuffer. Zudem besteht die Möglichkeit, dass U-Boote Funkbojen mit gespeicherten Nachrichten aufsteigen lassen, die etwa an einen Satelliten gesendet werden, wie z. B. SLOT-Bojen auf U-Booten der Los-Angeles-Klasse.
Den Wissenschaftlern Maurice Green und Kenneth Scussel vom US Office of Naval Research (ONR) gelang es 2007, Ansätze für eine Unterwasser-Variante des GPS-Netzes zu entwickeln. Es soll genaue Positionsbestimmung von U-Booten ermöglichen. Das System ist in der Lage, anhand von akustischen Signalen und Computerberechnungen die Position von U-Booten und in Zukunft möglicherweise auch von Tauchern zu orten. Hierzu werden am Meeresgrund fest verankerte, genau positionierte GPS-Basisstationen eingerichtet. Ein U-Boot kann über Sonarimpulse mit der GPS-Basisstation am Meeresboden „kommunizieren“. Durch das Antwortsignal der GPS-Meeresbodenstation, das die genaue Tiefe und den Peilwinkel des empfangenen Schall-Impulses errechnet, kann ein Computersystem an Bord eines U-Bootes mit den GPS-Daten die eigene Position unter Wasser berechnen.
Mit der Idee der US-Navy, Unterwasserdrohnen in größerem Stil einzusetzen, nahm auch der Bedarf an kleineren und technisch weniger aufwendigen Navigationssystemen unter Wasser zu. BAE Systems begann mit der Entwicklung eines Positioning System for Deep Ocean Navigation (POSYDON), ein System von Unterwasserschallwandlern in Bojen, die ähnlich den GPS-Satelliten ein exaktes Zeitsignal mittels Schallwellen aussenden. Die Empfänger sollen über die jeweiligen Laufzeiten ihre eigene Position errechnen können. Die Ausbreitung von Schall im Wasser ist jedoch an die Funktionen aus den Faktoren Wassertemperatur und Salinität gebunden, was praxisgerechte Umsetzung verkompliziert.[26]
Torpedos sind die bekannteste Waffe militärischer U-Boote. Sie werden über Torpedorohre aus dem Rumpf ausgestoßen und von einem Schraubenantrieb, neuerdings auch von einem Wasserstrahl- oder einem zu Superkavitation führenden Raketentriebwerk angetrieben. Moderne Torpedos werden meist von den sie abschießenden U-Booten aus über einen Draht ferngelenkt, können aber auch selbstständig Ziele erkennen. Die Torpedoräume, in denen die Torpedos und andere Waffen gelagert werden, befinden sich meist im Bug des U-Bootes. Bei neueren Entwicklungen, zum Beispiel der US-amerikanischen Los-Angeles-Klasse, wurden dagegen die Waffen eher mittschiffs untergebracht und die Torpedorohre schräg nach vorne gerichtet; auf diese Weise konnte ein leistungsfähigeres Aktivsonar im Bug untergebracht werden. Torpedorohre im Heck eines U-Bootes waren noch bis nach dem Zweiten Weltkrieg üblich, werden heute jedoch nicht mehr verwendet, da sie für fernlenkbare oder autonom zielsuchende Torpedos nicht erforderlich sind.
Aus den Torpedorohren moderner U-Boote können auch Flugkörper gestartet werden. Das gängigste Prinzip hierbei ist es, einen Flugkörper, der auch von Überwasserschiffen gestartet werden kann, in einen zylindrischen Container zu verstauen. Dieser Container verlässt das U-Boot auf die gleiche Art und Weise wie ein Torpedo und durchstößt die Wasseroberfläche; danach gibt er den Flugkörper frei. Solche Flugkörper werden überwiegend gegen Schiffe eingesetzt.
Auch Marschflugkörper gegen Landziele können aus Torpedorohren gestartet werden. Allerdings werden sie überwiegend aus senkrechten Startschächten abgefeuert, um die Anzahl der mitgeführten Torpedos nicht reduzieren zu müssen. Auf die Verwendung von Anti-Schiff-Lenkflugkörpern spezialisierte U-Boot-Typen werden im Allgemeinen mit den Kürzeln SSG bzw. SSGN klassifiziert. Neben den erwähnten Vertikalstartern fanden auch andere Startverfahren Verwendung; so war die US-amerikanische USS Halibut mit einer Startrampe auf dem Vordeck ausgerüstet, während auf den sowjetischen Klassen Juliett und Echo die Flugkörper in im Winkel von 20° aufstellbaren Startbehältern untergebracht waren. Im Gegensatz zu modernen Entwürfen mussten diese frühen Flugkörper-U-Boote allesamt zum Abfeuern der Waffen auftauchen.
Ballistische Flugkörper (Submarine-launched ballistic missile, SLBM) werden aus senkrechten Schächten gestartet. Sie haben wesentlich größere Durchmesser als Torpedos und sollen möglichst schnell das Wasser verlassen. Die meisten modernen U-Boote mit ballistischen Raketen (Klassifizierung SSBN oder SSB) sind dazu mit einer Anzahl von Raketensilos ausgerüstet, die sich mittschiffs hinter dem Turm befinden. Ausnahmen sind die russische Typhoon-Klasse, bei der sich der Turm am Rumpfende und die Raketen davor befinden, sowie die älteren, mittlerweile außer Dienst gestellten Klassen Golf und Hotel, bei denen die Raketen im Turm untergebracht waren. Nachdem die ersten ballistischen Raketen, die von U-Booten aus abgefeuert werden konnten, noch als Mittelstreckenraketen klassifiziert wurden (zum Beispiel UGM-27 Polaris), verfügen modernere Raketen wie die Trident mittlerweile über die Reichweiten von Interkontinentalraketen. Nur auf den erwähnten älteren U-Booten der Golf- und Hotel-Klasse kamen als ballistische Raketen anfangs Kurzstreckenraketen vom Typ Scud mit einer Reichweite von 150 km zum Einsatz. U-Boot-gestützte ballistische Raketen sind meist nuklear bestückt und sollen in der Theorie des Atomkriegs als Zweitschlagwaffen zum Einsatz kommen.
Im Gegensatz zu früheren Zeiten, in denen U-Boote mit an Deck montierten Geschützen bewaffnet waren, haben moderne U-Boote keine oder kaum Überwasserbewaffnung. Da U-Boote heutiger Zeit ausschließlich unter der Wasseroberfläche operieren, wird schlichtweg keine solche Bewaffnung gebraucht. Darüber hinaus wurden bereits gegen Ende des Zweiten Weltkrieges Decksgeschütze von U-Booten entfernt, um den hydrodynamischen Widerstand zu senken und die Unterwassergeschwindigkeit zu steigern. Die Tatsache allerdings, dass sich U-Boote fast nicht gegen U-Jagd-Hubschrauber und -Flugzeuge verteidigen können, verlangt nach der Entwicklung von Flugabwehrwaffen, die von getauchten U-Booten aus einsetzbar sind. Es existieren lediglich verschiedene schultergestützte Flugabwehr-Raketenstarter ähnlich der bekannten FIM-92 Stinger, die vom Turm abgefeuert werden. Beispielsweise ist die russische Sierra-Klasse mit Startvorrichtungen für Raketen der Typen 9K32 Strela-2MF oder 9K34 Strela-3 ausgestattet. Die deutsche Marine entwickelt zurzeit mit dem System IDAS für die U-Boot-Klasse 212 A allerdings eine Flugabwehrwaffe, die auch von einem getauchten U-Boot aus einem Torpedorohr ausgestoßen und auf ein Ziel über der Wasseroberfläche abgefeuert werden kann.
Wie beispielsweise die Katastrophen der Thresher, der Scorpion oder der Kursk zeigen, kommt es auch in Friedenszeiten immer wieder zu Unglücksfällen. Um die Besatzung zu retten, wurden verschiedene Rettungsmittel entwickelt:
Rettungs-U-Boot: Kleine, transportable und weitgehend autarke U-Boote, die auf dem Ausstieg des havarierten U-Bootes andocken und es evakuieren. Vorgänger waren spezielle Tauchglocken. Taucher bzw. Panzertauchgeräte und Unterwasserroboter unterstützen den Einsatz.
Rettungsboje: Sie steigt vom Wrack auf, markiert die Unglücksstelle und ermöglicht über das Bojenseil die Verankerung von Hebezeugen.
Rettungskapsel: Eine größere Rettungsboje, in der die Besatzung Platz findet. Sie dient nach dem Aufstieg als Rettungsinsel.
Tauchretter: Die Mischung aus Atemgerät und Schwimmweste ermöglicht nach dem Passieren einer Druckschleuse oder eines Ausstiegskragens (der das Fluten des U-Bootes notwendig macht) den Notaufstieg (bei kleinen U-Booten oft der einzige Rettungsweg).
Andere Rettungsmaßnahmen: Bei Wassereinbruch begrenzen wasserdichte Schotten den Wassereinbruch. Notausblasen (Emergency Blow) der Tauchzellen und ein dynamischer Notaufstieg zur Oberfläche sind eventuell noch möglich.
Resus-Flaschen: Die Hydrazin-Gaserzeuger sind modular aufgebaute, identische Systeme. Sie erzeugen auf einen elektrischen Impuls hin das benötigte Arbeitsgas zum Ausblasen der Tauchzellen durch katalytische Zersetzung des Hydrazins. Die Starteinrichtung der „Resus“-Systeme kann manuell oder vollautomatisch in Abhängigkeit von einer bestimmten Tauchtiefe betätigt werden.
Die Deutsche Marine als Teilstreitkraft der Bundeswehr verfügt nur über U-Boote mit Diesel- und mit Brennstoffzellenantrieb, nicht jedoch über Atom-U-Boote. Da die Aufgaben der Deutschen Marine im NATO-Bündnis anfangs auf reine Küstenüberwachung festgelegt waren und als Operationsfeld lediglich die „flache“ Ostsee sowie die Nordsee in Frage kamen, waren vor allem sehr kleine, leise und nicht für große Tiefen ausgelegte U-Boote relevant. Daher spielten während der Zeit des Ost-West-Konflikts die seinerzeit 24 U-Boote der damaligen Bundesmarine eine wichtige Rolle bei der Verteidigung der westdeutschen und dänischen Ostseeküste gegen amphibische Landungen der Marinen des Warschauer Pakts. Außerdem gab es eine internationale Beschränkung, dass Deutschland nur über U-Boote (Tauchboote) bis maximal 500 Tonnen Wasserverdrängung verfügen darf. Mit den veränderten politischen Verhältnissen haben sich jedoch auch die Aufgaben der Deutschen Marine verändert. Dennoch wurde bisher auf Atom-U-Boote zu Gunsten der Fortentwicklung der konventionellen U-Boote verzichtet. Die neuen Boote mit Brennstoffzellenantrieb der Klasse 212 A dienen vornehmlich der Bekämpfung anderer U-Boote sowie der unbemerkten Aufklärung und operieren je nach Bedarfsfall weltweit. Weiterhin waren bis zum Juni 2010 U-Boote der Klasse 206A im Dienst, deren Einsatzgebiet von der Nord- und Ostsee bis in den Mittelmeerraum reichte. Die Kommandanten der deutschen U-Boote haben die Dienstgrade Kapitänleutnant, Korvettenkapitän oder Fregattenkapitän.
Kanadisches Forschungs-U-Boot Pisces IV wird von seinem Versorgungsschiff herabgelassenBathyscaph Trieste II – Unter dem großen Auftriebskörper ist der Druckkörper zu erkennen
Neben der militärischen Nutzung gibt es zivile Aufgaben für U-Boote.
Tiefsee-U-Boote oder Bathyscaphe dienen Forschungszwecken und können wesentlich tiefer tauchen als militärische U-Boote. Meist sind sie um einen kugelförmigen Druckkörper herum konstruiert, haben Batteriebetrieb und können sich nicht besonders schnell fortbewegen. Ihre Tiefensteuerung erfolgt oft durch vertikale Schraubenantriebe. Aufbauend auf der Bathysphere von William Beebe aus den 1930er Jahren wurden in den 1950er Jahren die Bathyscaphen FNRS-2, FNRS-3 und Trieste zum Einsatz gebracht und konnten immer größere Tieftauchrekorde aufstellen. Am 23. Januar 1960 wurde mit der Trieste, im Challengertief im Marianengraben, eine Tiefe von 10910 m erreicht, die erst am 28. April 2019 von der Expedition „Five Deep“ mit dem U-Boot DSV Limiting Factor mit einer Tiefe von 10934 m übertroffen wurde.[27][28] Neben diesen alleine für vertikale Fahrten beim Einsatz zu ozeanografischen Forschungen in großen Tiefen konstruierten Bathyscaphen wurden ab etwa 1960 auch zahlreiche kleinere Forschungs-U-Boote hergestellt, die für geringere Tauchtiefen konzipiert sind. Sie sind horizontal beweglicher und eignen sich deswegen für eine Vielzahl wissenschaftlicher und technischer Arbeiten.
Such-U-Boote sollen oftmals unbemannt Objekte auf dem Meeresgrund aufspüren und untersuchen. Bekanntheit erlangten zum Beispiel die Expeditionen zu den Wracks der Titanic (mit der Alvin) oder der Bismarck. Das einzige nukleargetriebene Forschungs-U-Boot war die NR-1 der US Navy.
Touristen-U-BooteTouristen-U-Boot Nemo beim Einlaufen in den Hafen von Portals Nous auf der BaleareninselMallorca werden verwendet, um die Unterwasserwelt für Touristen zu erschließen. Sie besitzen große Panoramafenster und können daher nicht sehr tief tauchen (nur wenige Meter). Meist werden sie in der Nähe von Riffen eingesetzt wie zum Beispiel auf den Azoren oder den Kanarischen Inseln. Das erste speziell für touristische Zwecke gebaute U-Boot war die Auguste Piccard (PX-8), die 1964 anlässlich der Schweizerischen Landesausstellung mit bis zu 40 Passagieren im Genfersee tauchte.
Unbemannte U-Boote (auch Tauchroboter) dienen vor allem zur Forschung und sind meist mit Kameras, oft auch mit Greifarmen ausgestattet. Sie können extrem tief tauchen und sind wesentlich kleiner als bemannte U-Boote, da sie keinen Sauerstoffvorrat und keine Passagiere transportieren müssen.
Daneben existieren auch ferngesteuerte U-Boot-Modelle, die von Modellbauern gebaut werden oder auch als Spielzeug verkauft werden. Ihre Tauchtiefe beträgt höchstens einige Meter.
Handels-U-Boote kamen lediglich in den beiden Weltkriegen zum Einsatz, um feindliche Seeblockaden zu umgehen, mit neutralen Staaten Handel zu treiben und dabei kriegswichtige Güter zu beschaffen.
Schmuggel-U-Boote sind keine U-Boote, sondern Halbtauchschiffe (sogenannte self-propelled semi-submersibles/SPSS), die zum Drogenschmuggel dienen. Seit 2006 ist eine größere Zahl dieser Boote in den Urwäldern Kolumbiens gebaut worden, die zwischen 12 und 25 m lang sind und bis zu 15 Tonnen Ware oder fünf Personen transportieren können. Sie werden meist am Ziel aufgegeben und versenkt.[29][30] In der DDR gab es Versuche, Kleinst-U-Boote für die Flucht aus der DDR zu bauen, jedoch wurden diese Versuche durch die Stasi enttarnt.[31]
Rettungs-U-Boote: Bergung oder Rettung verunglückter U-Boot-Besatzungen spielt vor allem im militärischen Bereich eine Rolle. Nach dem Verlust der U-Boote USS Thresher und Scorpion entwickelte die US-amerikanische Marine das sogenannte Deep Submergence Rescue Vehicle (DSRV). Auch die UdSSR bzw. Russische Föderation (Pris-Klasse), Großbritannien (LR-5) und Schweden (URF) haben solche Fahrzeuge im Dienst, daneben noch Italien, Japan, Korea, Australien und China.
Reparatur/Wartung: Reparatur oder Wartung von bestimmten Objekten unter Wasser wie zum Beispiel Pipelines, Bohrinseln, Unterwasserstationen oder -kabeln werden oftmals durch spezielle Reparatur-U-Boote ausgeführt, die über dafür notwendige Vorrichtungen bzw. Werkzeuge wie zum Beispiel Greifarme, Schweißgeräte, Schraubenschlüssel etc. verfügen. Häufig werden hierfür auch Tauchroboter eingesetzt.
Als U-Boot-Ausschnitt wird die Form eines Halsausschnittes eines Damenkleids bezeichnet, dessen Kontur vorne mittig ein Stück geradlinig und waagrecht verläuft und damit an die Kielform eines U-Boots in Seitenansicht erinnert.[32]
Eminio Bagnasco: U-Boote im 2. Weltkrieg – Technik-Klassen-Typen. Eine umfassende Enzyklopädie, Motorbuch, Stuttgart 1988, ISBN 3-613-01252-9.
Ulrich Gabler: Unterseebootbau. Bernard & Graefe, Koblenz 1997, ISBN 3-7637-5958-1.
Eberhard Rössler: Geschichte des deutschen U-Bootbaus. Band 1. Bernard & Graefe, Bonn 1996, ISBN 3-86047-153-8.
Eberhard Rössler: Geschichte des deutschen U-Bootbaus. Band 2. Bernard & Graefe, Bonn 1996, ISBN 3-86047-153-8.
Stephan Huck (Hrsg.): 100 Jahre U-Boote in deutschen Marinen. Ereignisse – Technik – Mentalitäten – Rezeption. Unter Mitarbeit von Cord Eberspächer, Hajo Neumann und Gerhard Wiechmann. Mit Beiträgen von Torsten Diedrich, Peter Hauschildt, Linda Maria Koldau, Klaus Mattes, Karl Nägler, Hajo Neumann, Kathrin Orth, Michael Ozegowski, Werner Rahn, René Schilling, Heinrich Walle und Raimund Wallner, Bochum. Dr. Dieter Winkler Verlag, 2011, ISBN 978-3-89911-115-6 (Kleine Schriftenreihe zur Militär- und Marinegeschichte, Band 18).
Richard Garret: U-Boote. Manfred Pawlak, Herrsching 1977.
Norbert W. Gierschner: Tauchboote. Interpress / VEB Verlag für Verkehrswesen, Berlin 1980.
↑Norbert Gierschner: Tauchfahrzeuge. Die Geschichte der Unterwasserfahrzeuge. 1. Auflage. transpress Verlag für Verkehrswesen, Berlin 1987, ISBN 3-344-00108-6, S.7.
↑Nicolás García Tapia: Un inventor navarro. Jerónimo de Ayanz y Beaumont (1553-1613). Universidad Pública de Navarra, Pamplona 2010, ISBN 978-84-9769-260-1, S.161–166 (spanisch).
↑Walther Kiaulehn: Die eisernen Engel. Eine Geschichte der Maschinen von der Antike bis zur Goethezeit. Deutscher Verlag, Berlin 1935; neu aufgelegt 1953 im Rowohlt-Verlag
↑Norman Polmar, Kenneth J. Moore: Cold War Submarines: The Design and Construction of U.S. and Soviet Submarines. Washington, D.C 2003, ISBN 1-57488-594-4.
↑ abcdRoy Burcher, Louis Rydill: Concepts In Submarine Design, 1994, Cambridge University Press, ISBN 978-0-521-41681-8, Kapitel 9.17,9.18 und 9.19
↑Ingo Pfeiffer: Republikfluchten unter Wasser – Geheime Mini-U-Boote in der DDR. In: Marineforum, 12-2008, S. 40 ff. Zu lesen auch auf GlobalDefence.net (Memento vom 27. Dezember 2010 im Internet Archive)




















_Arabian_Shark.jpg)



_Apra.jpg)

_at_submarine_base_New..._-_NARA_-_520835.jpg)
_at_periscope_depth_off_Malaysia.jpg)










 Torpedoraum eines U-Bootes
Torpedoraum eines U-Bootes Ballistische Raketenschächte in einem U-Bootrumpf
Ballistische Raketenschächte in einem U-Bootrumpf Startbehälter für Anti-Schiffs-Raketen auf einem U-Boot der Juliett-Klasse
Startbehälter für Anti-Schiffs-Raketen auf einem U-Boot der Juliett-Klasse Bedienung eines Decksgeschützes auf hoher See
Bedienung eines Decksgeschützes auf hoher See


-_by-RaBoe_02.jpg)


 US-amerikanisches Rettungs-U-Boot Mystic
US-amerikanisches Rettungs-U-Boot Mystic U-Boot-Rettungskammer
U-Boot-Rettungskammer Telefonboje
Telefonboje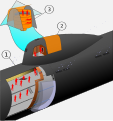 Rettungskapsel der russischen Akula-Klasse
Rettungskapsel der russischen Akula-Klasse








